

圖1 智能閥門定位器工作原理圖
2 定位器的流量特性
調(diào)節(jié)閥流量特性和定位器的流量特性是兩個(gè)不同的概念。調(diào)節(jié)閥理想流量特性是指在調(diào)節(jié)閥前后壓差固定不變情況下的流量特性,用通過閥芯相對流量與控制信號相對變化的比值來表示。調(diào)節(jié)閥的流量特性取決于閥芯的形狀,有直線、等百分比、拋物線及快開4種典型的固有流量特性。
定位器的流量特性是指定位器輸入信號與閥門開度之間的關(guān)系。對于一個(gè)確定的閥,其結(jié)構(gòu)特性不變,即流量的相對變化與閥桿相對位移的比值是不變的。智能閥門定位器可以通過改變閥桿相對位移與控制信號的相對變化之間的比值,從而改變調(diào)節(jié)閥的流量特性。
在定位器的流量特性實(shí)現(xiàn)過程中,根據(jù)給定的流量特性數(shù)據(jù),采用曲線擬合的方法,獲得流量特性曲線方程,編程實(shí)現(xiàn)輸入信號與閥門開度之間的關(guān)系。當(dāng)定位器安裝在調(diào)節(jié)閥上,用戶可以選擇不同的流量特性曲線,實(shí)現(xiàn)調(diào)節(jié)閥的流量控制。
3 閥位反饋非線性修正
非線性修正是用于解決閥桿行程與閥位反饋信號之間的非線性。閥位反饋模塊是由反饋連桿、減速齒輪和位置傳感器等組成,其機(jī)械連接原理示意圖如圖2所示,位置傳感器采用高精度導(dǎo)電塑料旋轉(zhuǎn)電位器,將執(zhí)行機(jī)構(gòu)的直行程轉(zhuǎn)換為角位移。

圖2 閥位反饋模塊機(jī)械連接原理圖
閥桿運(yùn)動(dòng)距離h與連桿轉(zhuǎn)角θ之間的關(guān)系為:
h=Ltanθ (1)
其中,θ∈[-α/2,α/2],h∈[-H/2,H/2],α為連桿全行程轉(zhuǎn)過的角度,H為閥桿全行程的距離。
由于電位器為線性電位器,所以電位器可變端電壓ui與連桿轉(zhuǎn)角θ之間的關(guān)系為:
 (2)
(2)
其中,u0為閥桿行程0%對應(yīng)的閥位反饋信號,u1為閥桿行程100%對應(yīng)閥位反饋信號。
電位器可變端電壓ui與對應(yīng)的AD采樣值Di的關(guān)系可表示為:
Di=kui (3)
閥桿行程的相對變化與閥位反饋信號相對變化的比值為:
 (4)
(4)
旋轉(zhuǎn)角度與電位器電壓成線性,閥桿行程與轉(zhuǎn)角成正切關(guān)系,通過非線性修正,閥桿行程與反饋信號才為線性關(guān)系。閥位反饋信號的非線性修正是實(shí)現(xiàn)更精確的流量控制的有效方法。
4 實(shí)驗(yàn)
以SEPP4000閥門定位器為研究對象,進(jìn)行靜態(tài)特性和流量特性實(shí)驗(yàn)。輸入信號為4mA~20mA的電流信號,輸出信號為閥門的開度,通過檢測閥位反饋信號獲取閥門的開度信息,為了使閥門開度與閥位反饋信號的百分比相等,采用公式(4)進(jìn)行閥位反饋的非線性修正。
4.1 靜態(tài)特性實(shí)驗(yàn)
定位器靜態(tài)特性表現(xiàn)為定位器實(shí)測曲線與理想曲線之間的一致性。
安裝SEPP4000智能閥門定位器,使定位器的行程正好為全行程的一半時(shí),定位器反饋桿在水平位置(即垂直于閥桿)。以線性流量特性為例,進(jìn)行定位器靜態(tài)特性實(shí)驗(yàn)。數(shù)據(jù)處理流程圖如圖3所示,誤差對比如表1所示。
表1 閥位反饋非線性修正前后誤差

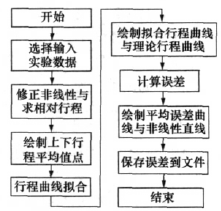
圖3 數(shù)據(jù)處理程序流程圖
修正前,實(shí)驗(yàn)測得的數(shù)據(jù)的重復(fù)性為0.3%,即小于0.5%,均達(dá)到待測定位器的指標(biāo)。但行程曲線的基本誤差、非線性誤差和最大測量誤差都較大。
修正后,實(shí)驗(yàn)測得的數(shù)據(jù)的重復(fù)性較小為0.48%,回滯誤差也較小為0.46%,均達(dá)到待測定位器的指標(biāo);而且所得行程曲線的基本誤差、非線性誤差和最大測量誤差均小于0.5%,達(dá)到定位器的指標(biāo)要求。
4.2 流量特性實(shí)驗(yàn)
選擇定位器的流量特性曲線線性、等百分比1∶25,等百分比1∶50,反等百分比25∶1,以10%為增量從0%到100%的等差輸入電流信號,測量閥位反饋電壓信號AD采樣值,得到實(shí)際流量特性曲線點(diǎn)集,用MATLAB軟件擬合實(shí)測曲線如圖4、圖5所示。星形點(diǎn)為實(shí)驗(yàn)所測的行程值,實(shí)線為所測的流量曲線,虛線為定位器的理想流量特性曲線。
修正前后,流量特性誤差對比如表2所示。
表2 修正前后流量特性曲線誤差對比
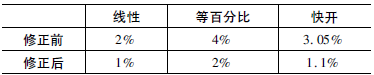

圖4 修正前理論與實(shí)測流量特性曲線

圖5 修正后理論與實(shí)測流量特性曲線
各實(shí)測行程曲線均較光滑,以快開流量特性為例,采用不同擬合函數(shù),誤差對比如表3所示。采用指數(shù)函數(shù)進(jìn)行曲線擬合,誤差更小,效果更好。
表3 不同擬合函數(shù)擬合誤差對比

5 結(jié)論
可通過非線性修正方法減小由反饋機(jī)構(gòu)本身的非線性造成的誤差。通過非線性修正后,流量特性的非線性誤差、回滯誤差、重復(fù)性均達(dá)到智能閥門定位器的指標(biāo),為達(dá)到了更高精度的流量控制要求打下基礎(chǔ)。