
π”√’f√˜∏£Ω®èBÈTºØ√¿
8-24ŸI»Î»AÑì◊C»Ø£∫2017H1òIøɸc‘u£∫òIøÉ≥÷¿mœÚ∫√£¨∆˚Ðáðp2017-08-24∏≈ƒÓÓ}≤ƒ∏¸∂ý“ª°¢∆˚ÐáðpªØÆa∆∑∆˚ÐáðpªØ∑Ω√Ê£¨π´Àæ÷˜“™òIÑ’ «È_∞l∫Õ÷∆‘ÏèÕ∫œ≤ƒ¡œµƒ∆˚ÐáÐá…̺∞¡„≤øº˛£¨÷˜“™á˙¿@...∂˛°¢≈cI
π´Àæ∫œ◊˜£¨Õÿ’π∆˚ÐáðpªØòIÑ’2016ƒÍ9‘¬∑ð£¨π´Àæ»´ŸY◊”π´Àæ∫£‘¥–¬≤ƒ¡œ≈c∆œÃ——¿I
π´Àæ∫û ¡À°∂’è...»˝°¢–¬ƒÐ‘¥∆˚Ðáú¿wæSÐá…ÌÌóƒø2015ƒÍ12‘¬∑ð£¨∂®‘ˆ…Í’à´@◊C±O∫Àú °£π´Àæ“‘10.06‘™/π…

18065931931 π˘Ωõ¿Ì
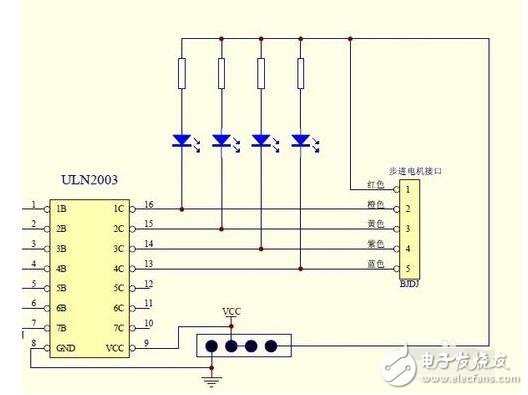
ULN2003 «“ªÇÄ∑«ÈTÎä¬∑£¨∞¸∫¨7ÇÄÜŒ‘™£¨∏˜∂˛òOπеƒ’˝òO∑÷ÑeΩ”∏˜þ_¡÷ÓDπеƒºØÎäòO°£”√”⁄∏––‘ÿìðdïr£¨‘ìƒ_Ω”ÿìðdÎä‘¥’˝òO£¨∆¿m¡˜◊˜”√£®‘⁄∏––‘ÿìðd÷–£¨Îä¬∑îýÈ_∫Ûï˛Æa…˙∫Ð¥Ûµƒ∑¥ÎäÑ”Ñð£¨ûÈ∑¿÷πìpâƒþ_¡÷ÓDπУ¨Ω”∑¥œýµƒ∂˛òOπÐÅÌòã≥…Õ®¬∑£¨ π÷ÆÞDìQûÈÎ䡘£©°£
°°°°≤ΩþMÎäôC «å¢Îä√}õ_–≈ÃñÞD◊ÉûÈΩ«Œª“∆ªÚæÄŒª“∆µƒÈ_≠høÿ÷∆ÎäôC£¨ «¨F¥˙îµ◊÷≥ÖÚøÿ÷∆œµΩy÷–µƒ÷˜“™àÖ–‘™º˛£¨ë™”√òOûÈèV∑∫°£°£‘⁄∑«≥¨ðdµƒ«Èõrœ¬£¨ÎäôCµƒÞDÀŸ°¢Õ£÷πµƒŒª÷√÷ª»°õQ”⁄√}õ_–≈ÃñµƒÓl¬ ∫Õ√}õ_îµ£¨∂¯≤ª Ðÿìðd◊ɪصƒ”∞Ì루Æî≤ΩþMÚåÑ”∆˜Ω” ’µΩ“ªÇÄ√}õ_–≈Ãñ£¨À¸æÕÚåÑ”≤ΩþMÎäôC∞¥‘O∂®µƒ∑ΩœÚÞDÑ”“ªÇÄπÃ∂®µƒΩ«∂»£¨∑QûÈ°∞≤ΩæýΩ«°±£¨À¸µƒ–˝ÞD «“‘πÃ∂®µƒΩ«∂»“ª≤Ω“ª≤Ωþ\––µƒ°£ø…“‘Õ®þ^øÿ÷∆√}õ_ÇÄîµÅÌøÿ÷∆Ω«Œª“∆¡ø£¨èƒ∂¯þ_µΩú ¥_∂®Œªµƒƒøµƒ£ªÕ¨ïrø…“‘Õ®þ^øÿ÷∆√}õ_Ól¬ ÅÌøÿ÷∆ÎäôCÞDÑ”µƒÀŸ∂»∫Õº”ÀŸ∂»£¨èƒ∂¯þ_µΩ’{ÀŸµƒƒøµƒ°£
°°°°µ⁄“ª≤ΩþMÎäôC–Ë“™µƒÚåÑ”Î䡘∫Ð¥Û£¨“Ú¥À÷±Ω” π”√ÜŒ∆¨ôCÕ˘Õ˘πЃ_Î䡘≤ªâÚ£¨º”…œ“ª∞„3.3VµƒÜŒ∆¨ôC“≤üo∑®ÚåÑ”5Vµƒ≤ΩþMÎäôC£¨“Ú¥À–Ë“™Îä¬∑ÞDìQ°£”√µƒULN2003–æ∆¨ÚåÑ”≤ΩþMÎäôC°£ULN2003æÕ «∆µΩ¡ÀÎ䡘∑≈¥Û◊˜”√£¨“≤ πµ√ÚåÑ”Îäâ∫◊É≥…¡À5V°£≥˝¡À”√ULN2003“≤ø…“‘◊‘º∫”√»˝òOπÐ¥ÓΩ®Îä¬∑£¨‘≠¿Ì≈cULN2003É»≤øΩYòãÓêÀ∆°£
°°°°
°°°°“≤æÕ «≤ΩþMÎäôC“™þ\ÞDïr£¨»Á∫ŒΩo√}õ_£¨◊åÎäôCþB¿mþ\Ñ”°£ps£∫»Áπ˚ΩoÂe√}õ_ø…ƒÐ◊ÛÞDé◊œ¬”÷ÞDªÿÅÌ°£œ¬àDæÕ «–°æéÎäôCµƒœý–Ú°£
°°°°
°°°°œ¬√Ê «’˝ÞD∑≠ÞDµƒæé¥a ∏˘ì˛ºº–g“™«Û°£»ÁàD”√µƒÜŒÎp∞À≈ƒ°£
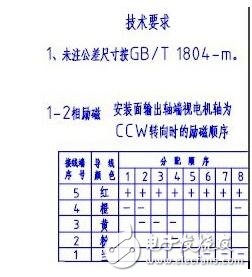
°°°°unsigned char F_RotaTIon£€8£ð={0x08£¨0x0c£¨0x04£¨0x06£¨0x02£¨0x03£¨0x01£¨0x09} ; //FAN
°°°°unsigned char B_RotaTIon£€8£ð={0x09£¨0x01£¨0x03£¨0x02£¨0x06£¨0x04£¨0x0c£¨0x08} ; //ZHENG
°°°°¥À∫ØîµÉ…ÇÄ֢¨µ⁄“ªÇÄÖ¢îµ «»¶îµ°£µ⁄∂˛ÇÄÖ¢îµ «∑ΩœÚ“≤æÕ «þxìÒ’˝ÞD∫Õ∑≠ÞD
°°°°void motorNCircle£®int n£¨bool posiTIon£©
°°°°{
°°°°int i=0;
°°°°int j=0;
°°°°int k=0;
°°°°for£®j=0;j°∂n;j £©
°°°°{
°°°°for£®i=0;i°∂64*8;i £©
°°°°{
°°°°for£®k=0;k°∂8;k £©
°°°°{
°°°°if£®TRUE == posiTIon£©
°°°°SetMotor£®F_Rotation£€k£ð£©;
°°°°else
°°°°SetMotor£®B_Rotation£€k£ð£©;
°°°°Delay£®20000£©;
°°°°}
°°°°}
°°°°}
°°°°}
°°°°œ¬√ÊæÕ «SetMotor∫Øîµ£¨∏˘ì˛Ç˜µƒîµì˛≤ªÕ¨£¨øÿ÷∆µƒ4ÇÄIO pinðî≥ˆ≤ªÕ¨°£
°°°°void SetMotor£®unsigned char InputData£©
°°°°{
°°°°if£®InputData & 0x08£©
°°°°{
°°°°GPIO_ResetBits£®GPIOC£¨ GPIO_Pin_6 £©;
°°°°}
°°°°else
°°°°{
°°°°GPIO_SetBits£®GPIOC£¨ GPIO_Pin_6£©;
°°°°}
°°°°if£®InputData & 0x04£©
°°°°{
°°°°GPIO_ResetBits£®GPIOC£¨ GPIO_Pin_7 £©;
°°°°}
°°°°else
°°°°{
°°°°GPIO_SetBits£®GPIOC£¨ GPIO_Pin_7£©;
°°°°}
°°°°if£®InputData & 0x02£©
°°°°{
°°°°GPIO_ResetBits£®GPIOC£¨ GPIO_Pin_8 £©;
°°°°}
°°°°else
°°°°{
°°°°GPIO_SetBits£®GPIOC£¨ GPIO_Pin_8£©;
°°°°}
°°°°if£®InputData & 0x01£©
°°°°{
°°°°GPIO_ResetBits£®GPIOC£¨ GPIO_Pin_9 £©;
°°°°}
°°°°else
°°°°{
°°°°GPIO_SetBits£®GPIOC£¨ GPIO_Pin_9£©;
°°°°}
°°°°}
°°°°
°°°°“‘28BYJ-48ûÈ¿˝£¨∏˘ì˛ºº–gŸY¡œ£¨≤ΩæýµƒΩ«∂»ûÈ5.625-64 ∂¯«“éß”–úpÀŸ˝XðÜ «1£∫64 “Ú¥ÀÞD64≥À64ÇÄ√}õ_≤≈ «1»¶°£ “Ú¥À“ªÇÄ√}õ_ÞDþ^5.625≥˝64=0.08789∂»°£
°°°°À˘“‘”–¡Àœ¬√ʵƒ—≠≠h°£
°°°°for£®j=0;j°∂n;j £©
°°°°{
°°°°for£®i=0;i°∂64*8;i £© //64*8
°°°°{
°°°°for£®k=0;k°∂8;k £© //4œýÜŒÎp8≈ƒ
°°°°{
°°°°if£®TRUE == position£©
°°°°SetMotor£®F_Rotation£€k£ð£©;
°°°°else
°°°°SetMotor£®B_Rotation£€k£ð£©;
°°°°Delay£®20000£©; //◊¢“‚þ@ÇÄ—”ïr◊‘º∫»•’{πù°£
°°°°}
°°°°}
°°°°
π”√’f√˜∏£Ω®èBÈTºØ√¿
‘⁄ŸF÷ðÀÕ◊ÉÎäôCæþŒÔŸYπ©ë™π´À滌ôzÚûπ§≥Ãéü÷¡ΩÒ°£∂ýƒÍÅÌ£¨Õ®þ^∑eíQ≈¨µÿåW¡ïå£òI÷™◊R£¨ π–޿̺ºƒÐ∫Õπ§≥ÃôC–µµƒå£òIÀÆ∆Ωµ√µΩ¥Û∑˘Ã·…˝°£ Æ”ýðdåç€`ΩõÚûªØ…Ì‘Olj°∞ªÓΩÃ≤ƒ°±◊˜ûÈ“ª√˚壬öôzÚûπ§≥Ãéü£¨ÒRπ‚∆Ωµƒ÷™◊RºÐòãÖs≤¢≤ªÜŒ“ª£¨10”ýƒÍÅÌ£¨À˚…Ê◊„ôC–µ‘OljπпÌæS◊oµƒ∏˜ÇÄ∑Ω√Ê£¨∑e¿€µƒÿS∏ª∂¯‘≠ ºµƒåç€`ΩõÚû°£ûÈÕÍ…∆ôC–µ‘Olj°¢π§∆˜æþ∑Ω√ʵƒπпÌ÷∆∂»£¨ÒRπ‚∆Ω∏˘ì˛∂ýƒÍèƒ ¬ôC–µ–Þ¿Ì∫ÕπпÌπ§◊˜ΩõÚû∫Õå¶π§∆˜æþµƒ Ïæö’∆Œ’≥Ã∂»£¨ΩY∫œº“”–ÍP

18065931931 π˘Ωõ¿Ì