
ØÖ¢|ļŖÖCĖ╩├Cļ]─Ž│╔ ╬ęų▓▒Ż¤o╚╦ÖC╩ął÷┐šķgīó▀_ĄĮ35ā|į¬,╬┤üĒ╬Õ─Ļ(2017-2021)─ĻŠ∙Å═║Žį÷ķL┬╩╝s×ķ38.29%,2021─Ļīó▀_ĄĮ128ā|į¬ĪŻ(Ū░š░ŠW)ųąŅĪ╣╚┐Ų╝╝ł@į┌ąņų▌ŅĪīÄķ_ł@,╩ū┼·20ČÓ╝ęųŪ─▄ųŲįņĪó╣Ø─▄Łh▒ŻĄ╚Ų¾śI╚ļ±vł@ģ^,į┌ł@ģ^ā╚▓┐,ųŪ╗█│Ū╩ąĪó╚╦─śūRäeĪóÖCŲ„╚╦Īó¤o╚╦ÖC┐Ų╝╝¾w“×ĒŚ─┐ę╗權Ń╚½ĪŻ╬┤üĒųąŅĪ╣╚īóĮ©įO│╔×ķ╝ę╝ē┐Ų╝╝ł@ģ^,┤“įņ╚²┤¾╠ž╔½«aśIʧ╗»╗∙Ąž,│╔×ķ╗┤║ŻĮøØ·ģ^ėąė░ĒæĄ─ʧ╗»╣żÅSĪŻ(Ė▀╣żÖCŲ„╚╦)ļx░Č

┬ōŽĄ 18065931931 ╣∙Įø└Ē
[ī¦ūx] ▓Į▀MļŖÖC╩Ūę╗ĘNū„×ķ┐žųŲė├Ą─╠žĘNļŖÖC, ╦³Ą─ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚(ĘQ×ķ"▓ĮŠÓĮŪ")ę╗▓Įę╗▓Į▀\ąąĄ─, Ųõ╠ž³c╩Ūø]ėąĘe└█š`▓Ņ(Š½Č╚×ķ100%), ╦∙ęįÅVĘ║æ¬ė├ė┌Ė„ĘNķ_Łh┐žųŲĪŻ

 ØÖ¢|ļŖÖCĖ╩├Cļ]─Ž│╔Ė╩├Cļ]─Ž│╔ØÖ¢|ļŖÖCĪŠūā┴┐2Ī┐
ØÖ¢|ļŖÖCĖ╩├Cļ]─Ž│╔Ė╩├Cļ]─Ž│╔ØÖ¢|ļŖÖCĪŠūā┴┐2Ī┐
▓Į▀MļŖÖCę“Ųõį┌╦┘Č╚║═╬╗ų├┐žųŲŠ½Č╚╔ŽĄ─ā׹ѹį─▄Ż¼į┌ļŖÖCąąśIųąæ¬ė├ÅVĘ║ĪŻī”ė┌▓Į▀MļŖÖCĄ─╝▄śŗ║═“īäėĘĮ╩ĮĪó╣żū„įŁ└ĒĪóæ¬ė├ųąĄ─ūóęŌ╩┬ĒŚŻ¼╬ęéāīó▀Mąą╔ŅČ╚Ų╩╬÷ĪŻ
ĪĪĪĪ▓Į▀MļŖÖC╩Ūę╗ĘNū„×ķ┐žųŲė├Ą─╠žĘNļŖÖC, ╦³Ą─ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚(ĘQ×ķ"▓ĮŠÓĮŪ")ę╗▓Įę╗▓Į▀\ąąĄ─, Ųõ╠ž³c╩Ūø]ėąĘe└█š`▓Ņ(Š½Č╚×ķ100%), ╦∙ęįÅVĘ║æ¬ė├ė┌Ė„ĘNķ_Łh┐žųŲĪŻ▓Į▀MļŖÖCĄ─▀\ąąę¬ėąę╗ļŖūėčbų├▀Mąą“īäė, ▀@ĘNčbų├Š═╩Ū▓Į▀MļŖÖC“īäėŲ„, ╦³╩Ū░č┐žųŲŽĄĮy░l│÷Ą─├}ø_ą┼╠¢▐D╗»×ķ▓Į▀MļŖÖCĄ─ĮŪ╬╗ęŲ, ╗“š▀šf: ┐žųŲŽĄĮy├┐░lę╗éĆ├}ø_ą┼╠¢, ═©▀^“īäėŲ„Š═╩╣▓Į▀MļŖÖCą²▐Dę╗▓ĮŠÓĮŪŻ¼╦∙ęį▓Į▀MļŖÖCĄ─▐D╦┘┼c├}ø_ą┼╠¢Ą─Ņl┬╩│╔š²▒╚ĪŻę“┤╦┐žųŲ▓Į▀M├}ø_ą┼╠¢Ą─Ņl┬╩Ż¼┐╔ęįī”ļŖÖCŠ½┤_š{╦┘Ż╗┐žųŲ▓Į▀M├}ø_Ą─éĆöĄŻ¼┐╔ęįī”ļŖÖCŠ½┤_Č©╬╗─┐Ą─ĪŻ▀@ę╗ŠĆąįĻPŽĄĄ─┤µį┌Ż¼╝ė╔Ž▓Į▀MļŖÖCų╗ėąų▄Ų┌ąįĄ─š`▓ŅČ°¤o└█Ęeš`▓ŅĄ╚╠ž³cĪŻ╩╣Ą├į┌╦┘Č╚Īó╬╗ų├Ą╚┐žųŲŅIė“ė├▓Į▀MļŖÖCüĒ┐žųŲūāĄ─ĘŪ│ŻĄ─║åå╬ĪŻ
ĪĪĪĪę╗Īó▓Į▀MļŖÖCĄ─śŗįņŻ©ęį╬ÕŽÓ▓Į▀MļŖÖC×ķ└²Ż®
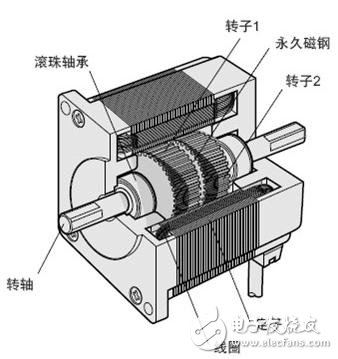
ĪĪĪĪ▓Į▀MļŖÖCĄ─śŗįņ╚ńŽ┬łD╦∙╩ŠŻ¼┤¾ų┬Ęų×ķČ©ūė║═▐Dūėā╔▓┐ĘųĪŻ▐Dūėė╔▐Dūė1Īó▐Dūė2║═ė└Š├┤┼õōĮM│╔ĪŻ
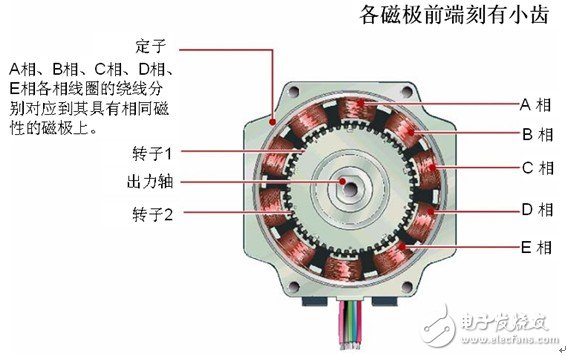
ĪĪĪĪČ©ūėōĒėąąĪ²XĀŅĄ─┤┼śOŻ¼╣▓ėą 10éĆŻ¼Įį└@ėąŠĆ╚”ĪŻ ŲõŠĆ╚”Ą─ī”ĮŪ╬╗ų├Ą─┤┼śOŽÓ╗ź▀BĮėų°Ż¼ļŖ┴„┴„═©║¾Ż¼ŠĆ╚”╝┤Ģ■▒╗┤┼╗»│╔═¼ę╗śOąįĪŻŻ©└²╚ń─│ę╗ŠĆ╚”Įøė╔ļŖ┴„Ą─┴„═©║¾Ż¼ī”ĮŪŠĆĄ─┤┼śOīó ═¼╗»│╔ S śO╗“ N śOĪŻŻ® ī”ĮŪŠĆĄ─ 2éĆ┤┼śOą╬│╔ 1éĆŽÓŻ¼Č°ė╔ė┌ėą AŽÓų┴ EŽÓĄ╚ 5éĆŽÓ╬╗Ż¼ę“┤╦ĘQ×ķ 5 ŽÓ▓Į▀MļŖäėÖCĪŻ

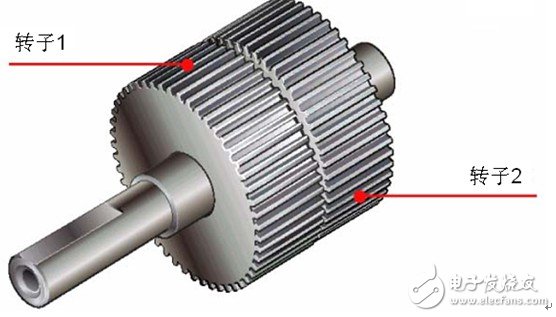
ĪĪĪĪ▐DūėĄ─═Ō╚”ė╔ 50éĆąĪ²Xśŗ│╔Ż¼▐Dūė 1 ║═▐Dūė 2 Ą─ąĪ²Xė┌śŗįņ╔Ž╗ź ŽÓÕeķ_ 1/2 ┬▌ŠÓĪŻė╔┤╦▐Dūėą╬│╔┴╦100éĆąĪ²XĪŻ─┐Ū░ęčĮøėą▐Dūėå╬éĆ╝ė╣żų┴100²XĄ─Ė▀Ęų▒µ┬╩ą═Ż¼─Ū├┤Ė▀Ęų▒µ┬╩ą═Ą─▐DūėŠ═ėą200éĆąĪ²XĪŻę“┤╦ŲõÖCąĄ╔ŽŠ═┐╔ęįīŹ¼FŲš═©▓Į▀MļŖÖC░ļ▓Į(Ųš═©▓Į▀MļŖÖC░ļ▓ĮąĶę¬ļŖÜŌ╝ÜĘų▀_ĄĮ)Ą─Ęų▒µ┬╩ĪŻ
ĪĪĪĪČ■Īó▓Į▀MļŖÖC╣żū„įŁ└Ē
ĪĪĪĪ«öļŖ┴„┴„▀^Č©ūė└@ĮMĢrŻ¼Č©ūė└@ĮM«a╔·ę╗╩Ė┴┐┤┼ł÷ĪŻįō┤┼ł÷Ģ■Ħäė▐Dūėą²▐Dę╗ĮŪČ╚Ż¼╩╣Ą├▐DūėĄ─ę╗ī”┤┼ł÷ĘĮŽ“┼cČ©ūėĄ─┤┼ł÷ĘĮŽ“ę╗ų┬ĪŻ«öČ©ūėĄ─╩Ė┴┐┤┼ł÷ą²▐Dę╗éĆĮŪČ╚ĪŻ▐Dūėę▓ļSų°įō┤┼ł÷▐Dę╗éĆĮŪČ╚ĪŻ├┐▌ö╚ļę╗éĆļŖ├}ø_Ż¼ļŖäėÖC▐Däėę╗éĆĮŪČ╚Ū░▀Mę╗▓ĮĪŻ╦³▌ö│÷Ą─ĮŪ╬╗ęŲ┼c▌ö╚ļĄ─├}ø_öĄ│╔š²▒╚Īó▐D╦┘┼c├}ø_Ņl┬╩│╔š²▒╚ĪŻĖ─ūā└@ĮM═©ļŖĄ─Ēśą“Ż¼ļŖÖCŠ═Ģ■Ę┤▐DĪŻ╦∙ęį┐╔ė├┐žųŲ├}ø_öĄ┴┐ĪóŅl┬╩╝░ļŖäėÖCĖ„ŽÓ└@ĮMĄ─═©ļŖĒśą“üĒ┐žųŲ▓Į▀MļŖÖCĄ─▐DäėĪŻ


ĪĪĪĪ╚²Īó▓Į▀MļŖÖCĄ─┐žųŲ
ĪĪĪĪ▓Į▀MļŖÖC“īäėĘĮ╩Įėą╚²ĘN╗∙▒ŠĄ─“īäė─Ż╩ĮŻ║š¹▓ĮĪó░ļ▓ĮĪó╝ÜĘųĪŻŲõų„ę¬ģ^äeį┌ė┌ļŖÖCŠĆ╚”ļŖ┴„Ą─┐žųŲŠ½Č╚(╝┤╝ż┤┼ĘĮ╩Į)ĪŻ═©│Ż▓Į▀MļŖÖCČ╝ėąĄ═Ņlš±äėĄ─╠ž³cŻ¼═©▀^╝ÜĘųš{ģf┐╔ęįĖ─╔ŲļŖÖCĄ═╦┘äė▀\ąąĄ─ŲĮ║ŌąįĪŻŽ┬├µĮo┤¾╝ęįö╝ÜĮķĮBę╗Ž┬Ż║
ĪĪĪĪ1Īóš¹▓Į“īäė
ĪĪĪĪį┌š¹▓Į▀\ąąųąŻ¼═¼ę╗ĘN▓Į▀MļŖÖC╝╚┐╔┼õš¹/░ļ▓Į“īäėŲ„ę▓┐╔┼õ╝ÜĘų“īäėŲ„Ż¼Ą½▀\ąąą¦╣¹▓╗═¼ĪŻ▓Į▀MļŖÖC“īäėŲ„░┤├}ø_/ĘĮŽ“ųĖ┴Ņī”ā╔ŽÓ▓Į▀MļŖÖCĄ─ā╔éĆŠĆ╚”裣h╝ż┤┼(╝┤īóŠĆ╚”│õļŖįOČ©ļŖ┴„)Ż¼▀@ĘN“īäėĘĮ╩ĮĄ─├┐éĆ├}ø_īó╩╣ļŖÖCęŲäėę╗éĆ╗∙▒Š▓ĮŠÓĮŪŻ¼╝┤1.80Č╚ (ś╦£╩ā╔ŽÓļŖÖCĄ─ę╗╚”╣▓ėą200éĆ▓ĮŠÓĮŪ)ĪŻ
ĪĪĪĪ2Īó░ļ▓Į“īäė
ĪĪĪĪį┌å╬ŽÓ╝ż┤┼ĢrŻ¼ļŖÖC▐D▌S═Żų┴š¹▓Į╬╗ų├╔ŽŻ¼“īäėŲ„╩šĄĮŽ┬ę╗├}ø_║¾Ż¼╚ńĮo┴Ēę╗ŽÓ╝ż┤┼Ūę▒Ż│ųįŁüĒŽÓ└^╠Äį┌╝ż┤┼ĀŅæBŻ¼ätļŖÖC▐D▌SīóęŲäė░ļéĆ▓ĮŠÓĮŪŻ¼═Żį┌ŽÓÓÅā╔éĆš¹▓Į╬╗ų├Ą─ųąķgĪŻ╚ń┤╦裣hĄžī”ā╔ŽÓŠĆ╚”▀Mąąå╬ŽÓ╚╗║¾ļpŽÓ╝ż┤┼▓Į▀MļŖÖCīóęį├┐éĆ├}ø_0.90Č╚Ą─░ļ▓ĮĘĮ╩Į▐DäėĪŻ║═š¹▓ĮĘĮ╩ĮŽÓ▒╚Ż¼░ļ▓ĮĘĮ╩ĮŠ▀ėąŠ½Č╚Ė▀ę╗▒Č║═Ą═╦┘▀\ąąĢrš±äė▌^ąĪĄ─ā׳cŻ¼╦∙ęįīŹļH╩╣ė├š¹/░ļ▓Į“īäėŲ„Ģrę╗░Ń▀xė├░ļ▓Į─Ż╩ĮĪŻ
ĪĪĪĪ3Īó╝ÜĘų“īäė
ĪĪĪĪ╝ÜĘų“īäė─Ż╩ĮŠ▀ėąĄ═╦┘š±äėśOąĪ║═Č©╬╗Š½Č╚Ė▀ā╔┤¾ā׳cĪŻī”ė┌ėąĢrąĶꬥ═╦┘▀\ąą(╝┤ļŖÖC▐D▌SėąĢr╣żū„į┌60rpmęįŽ┬)╗“Č©╬╗Š½Č╚ę¬Ū¾ąĪė┌0.90Č╚Ą─▓Į▀Mæ¬ė├ųąŻ¼╝ÜĘų“īäėŲ„½@Ą├ÅVĘ║æ¬ė├ĪŻ
ĪĪĪĪŲõ╗∙▒ŠįŁ└Ē╩Ūī”ļŖÖCĄ─ā╔éĆŠĆ╚”Ęųäe░┤š²Žę║═ėÓŽęą╬Ą─┼_ļA▀MąąŠ½├▄ļŖ┴„┐žųŲŻ¼Å─Č°╩╣Ą├ę╗éĆ▓ĮŠÓĮŪĄ─ŠÓļxĘų│╔╚¶Ė╔éĆ╝ÜĘų▓Į═Ļ│╔ĪŻ└²╚ń╩«┴∙╝ÜĘųĄ─“īäėĘĮ╩Į┐╔╩╣├┐╚”200ś╦£╩▓ĮĄ─▓Į▀MļŖÖC▀_ĄĮ├┐╚”200*16=3200▓ĮĄ─▀\ąąŠ½Č╚(╝┤0.1125ĪŃ)ĪŻ
ĪĪĪĪ╦─Īóæ¬ė├ųąĄ─ūóęŌ³c
ĪĪĪĪ1Īó▓Į▀MļŖÖCæ¬ė├ė┌Ą═╦┘ł÷║Ž---├┐ĘųńŖ▐D╦┘▓╗│¼▀^1000▐DŻ¼Ż©0.9Č╚Ģr6666PPS)Ż¼ūŅ║├į┌1000-3000PPS(0.9Č╚Ż®ķg╩╣ė├Ż¼┐╔═©▀^£p╦┘čbų├╩╣Ųõį┌┤╦ķg╣żū„Ż¼┤╦ĢrļŖÖC╣żū„ą¦┬╩Ė▀Ż¼įļ궥═ĪŻ
ĪĪĪĪ2Īó▓Į▀MļŖÖCūŅ║├▓╗╩╣ė├š¹▓ĮĀŅæBŻ¼š¹▓ĮĀŅæBĢrš±äė┤¾ĪŻ
ĪĪĪĪ3Īó▐DäėæT┴┐┤¾Ą─žō▌dæ¬▀xō±┤¾ÖCū∙╠¢ļŖÖCĪŻ
ĪĪĪĪ4ĪóļŖÖCį┌▌^Ė▀╦┘╗“┤¾æT┴┐žō▌dĢrŻ¼ę╗░Ń▓╗į┌╣żū„╦┘Č╚ŲäėŻ¼Č°▓╔ė├ųØu╔²Ņl╠ß╦┘Ż¼ę╗ļŖÖC▓╗╩¦▓ĮŻ¼Č■┐╔ęį£p╔┘įļę¶═¼Ģr┐╔ęį╠ßĖ▀═Żų╣Ą─Č©╬╗Š½Č╚ĪŻ
ĪĪĪĪ5ĪóĖ▀Š½Č╚ĢrŻ¼æ¬═©▀^ÖCąĄ£p╦┘Īó╠ßĖ▀ļŖÖC╦┘Č╚,╗“▓╔ė├Ė▀╝ÜĘųöĄĄ─“īäėŲ„üĒĮŌøQŻ¼ę▓┐╔ęį▓╔ė├5ŽÓļŖÖCŻ¼▓╗▀^Ųõš¹éĆŽĄĮyĄ─ārĖ±▌^┘FŻ¼╔·«aÅS╝ę╔┘ĪŻ
ĪĪĪĪ╬ÕĪó▓Į▀MļŖÖC£yįćūóęŌ³c
ĪĪĪĪĖ∙ō■ć°ś╦GB/T 20638-2006Ż¼ī”ė┌▓Į▀MļŖÖCĄ─£yįć╬ęéāę╗░ŃąĶę¬ĻPūóĘ┤ļŖäėä▌│ŻöĄĪó▒Ż│ų▐DŠžĪó└@ĮM£ž╔²ĪóŠžĮŪ╠žąį£yįćĪóĀ┐│÷▐DŠžĪóūŅĖ▀Ę┤▐DŅl┬╩Ą╚£yįćĪŻ
ĪĪĪĪī”ė┌Ę┤ļŖäėä▌│ŻöĄĄ─£yįćŻ¼┐╔ęį▓╔ė├╣”┬╩Ęų╬÷āxĄ─£yįćĘĮĘ©ų▒Įėį┌āxŲ„╔ŽĄ├│÷Ę┤ļŖäėä▌│ŻöĄĪŻī”ė┌Ā┐│÷▐DŠžĄ─£yįćŻ¼ī”ė┌┤¾╗∙ū∙Ą─▓Į▀MļŖÖCŻ¼ę╗░Ń▓╔ė├┤┼Ę█ųŲäėŲ„║═ļŖÖC£yįćŲĮ┼_üĒ▀Mąą£yįćŻ¼ąĪ╗∙ū∙Ą─▓Į▀MļŖÖC▓╔ė├ÅŚ╗╔│ė║═└KūėĄ─ĮM║ŽĘĮĘ©üĒ£yįćĪŻMPTļŖÖC£yį接Įy─┐Ū░ßśī”▓Į▀MļŖÖCĄ─£yįć┐╔ęį╠ß╣®š¹¾wĄ─£yįćĘĮ░Ė║═£yį接ĮyŻ¼Ä═ų·╣ż│╠Ĥ┐ņ╦┘═Ļ╔Ųčą░lįOėŗĄ─▓Į▀MļŖÖCĪŻ



ØÖ¢|ļŖÖCĖ╩├Cļ]─Ž│╔
2░µŻ║ę¬┬äĄ┌A003░µŻ║įušōĄ┌A004░µŻ║Š█Į╣╣ŌĘ³ąąśI═Č┘YÖCė÷Ą┌A005░µŻ║ÖCśŗĄ┌A006░µŻ║ÖCśŗĄ┌A007░µŻ║╗∙ĮĄ┌A008░µŻ║Š█Į╣2016üåų▐Į╚┌šōē»Ą┌A009░µŻ║╣½╦ŠĄ┌A010░µŻ║╣½╦ŠĄ┌A011░µŻ║╩ął÷Ą┌A012░µŻ║öĄō■Ą┌B001░µŻ║B»BŅ^░µŻ║┼¹┬ČĄ┌B002░µŻ║ąąŪķĄ┌B003░µŻ║┼¹┬ČĄ┌B004░µŻ║┼¹┬ČĄ┌B005░µŻ║┼¹┬ČĄ┌B006░µŻ║┼¹┬ČĄ┌B007░µŻ║┼¹┬ČĄ┌B008░µŻ║


┬ōŽĄ 18065931931 ╣∙Įø└Ē