導(dǎo)讀] 小功率電動(dòng)機(jī)的分類(lèi) 按國(guó)家標(biāo)準(zhǔn)規(guī)定,小功率電動(dòng)機(jī)指折算至1500r/min(轉(zhuǎn)/分)時(shí)連續(xù)額定功率不超過(guò)1.1kw的電動(dòng)機(jī),也稱(chēng)為微電動(dòng)機(jī)或馬力電動(dòng)機(jī)

 福建泉州德化讓利促銷(xiāo)汽油發(fā)電機(jī)福建泉州德化讓利促銷(xiāo)汽油發(fā)電機(jī)
福建泉州德化讓利促銷(xiāo)汽油發(fā)電機(jī)福建泉州德化讓利促銷(xiāo)汽油發(fā)電機(jī)
一、小功率電動(dòng)機(jī)的分類(lèi) 按國(guó)家標(biāo)準(zhǔn)規(guī)定,小功率電動(dòng)機(jī)指折算至1500r/min(轉(zhuǎn)/分)時(shí)連續(xù)額定功率不超過(guò)1.1kw的電動(dòng)機(jī),也稱(chēng)為微電動(dòng)機(jī)或馬力電動(dòng)機(jī),其分類(lèi)如下:
1、小功率電動(dòng)機(jī)分為以下4種:
1) 小功率異步電動(dòng)機(jī);
① 三相異步電動(dòng)機(jī);
② 單相電阻起動(dòng)電動(dòng)機(jī);
③ 單相電容起動(dòng)電動(dòng)機(jī);
④ 單相電容運(yùn)轉(zhuǎn)電動(dòng)機(jī);
⑤ 單相電容雙值電動(dòng)機(jī);
⑥ 罩極異步電動(dòng)機(jī)。
2) 小功率同步電動(dòng)機(jī);
① 永磁同步電動(dòng)機(jī);
② 磁阻同步電動(dòng)機(jī);
③ 磁滯(zhi)同步電動(dòng)機(jī);
3) 小功率直流電動(dòng)機(jī);
① 有刷直流電動(dòng)機(jī);
A、勵(lì)磁直流電動(dòng)機(jī);B、永磁直流電動(dòng)機(jī)。
② 無(wú)刷直流電動(dòng)機(jī)。
4) 小功率交流換向器電動(dòng)機(jī);
① 單相串激電動(dòng)機(jī);
② 交直流兩用電動(dòng)機(jī);
③ 推斥電動(dòng)機(jī)。 二、電機(jī)的運(yùn)行原理
1、安培環(huán)路定律——全電流定律本定律闡(chan
)述電流產(chǎn)生磁場(chǎng)的規(guī)律,由式表達(dá):上式說(shuō)明沿任一條閉合回路L,磁場(chǎng)強(qiáng)度的線積分等于該閉合路所包圍的全電流。
將全電流定律用到電機(jī)中,由于電機(jī)磁路通常可按不同的材料和幾何尺寸分成幾段,每段中的磁場(chǎng)強(qiáng)度是相同的,因此可將上式寫(xiě)成:Hi----第i段磁路磁場(chǎng)強(qiáng)度(A/m)Li----第i段磁路計(jì)算長(zhǎng)度(m)Wi----磁勢(shì)(A)W---線圈匝數(shù)
磁場(chǎng)感應(yīng)電流產(chǎn)生的強(qiáng)弱及方向由磁感應(yīng)強(qiáng)度表示。形象的描繪磁場(chǎng)用磁力線,磁力線是閉合曲線,磁力線的方向與產(chǎn)生磁場(chǎng)的電流之間符合右螺旋法則。穿過(guò)單位面積的磁力線數(shù)就是感應(yīng)強(qiáng)度B.磁感應(yīng)強(qiáng)度不僅與電流有關(guān),而且與周?chē)橘|(zhì)有關(guān),當(dāng)周?chē)庞需F磁物質(zhì)時(shí),磁場(chǎng)會(huì)大大加強(qiáng),這是因?yàn)椴煌慕橘|(zhì)有不同的磁導(dǎo)率,磁導(dǎo)率用u0表示。真空磁導(dǎo)率磁場(chǎng)物質(zhì)u為u0的幾百倍至幾千倍,而且與磁場(chǎng)強(qiáng)度有關(guān),不是常數(shù),磁場(chǎng)強(qiáng)與磁感應(yīng)強(qiáng)度關(guān)系為H=B/u式中B—— 表示磁感應(yīng)強(qiáng)度(T)U——表示磁導(dǎo)率(H/m)H——表示磁場(chǎng)強(qiáng)度,也叫磁勢(shì)(A/m)在均勻磁場(chǎng)中,穿過(guò)面積S的磁力線定義為磁通。
2、電磁力定律本定律
闡述處于磁場(chǎng)中的載流導(dǎo)體受有電磁力作用。當(dāng)磁場(chǎng)與載流導(dǎo)體相互垂直時(shí),作用在導(dǎo)體相互垂直時(shí),作用在導(dǎo)體的電磁力為f=BiL式中
f——電磁力(N)
B———磁感應(yīng)強(qiáng)度(T)
i-----導(dǎo)體的電流(A)
L-----導(dǎo)體的有效長(zhǎng)度(m)
電磁力f的方向由左手定則判定:磁通指向手心,伸直四指指電流方向,垂直的拇指指電磁方向。
3、電磁感應(yīng)定律本定律
闡述磁通變化產(chǎn)生感生電勢(shì)的規(guī)律。
⑴變化磁通產(chǎn)生的感應(yīng)電勢(shì)——變壓器電勢(shì)
式中W—與磁通Φ相交鏈的線圈匝數(shù)Φ—與線圈交鏈的磁通(Wb)t—時(shí)間(s)e—感應(yīng)動(dòng)勢(shì)(V)
⑵切割電勢(shì),導(dǎo)線在磁場(chǎng)中運(yùn)動(dòng)并切割磁力線時(shí),導(dǎo)體中產(chǎn)生感應(yīng)電動(dòng)勢(shì):e=BL.V式中B—磁感應(yīng)強(qiáng)度(T)L—導(dǎo)線有效長(zhǎng)度V—導(dǎo)線垂直于磁場(chǎng)的運(yùn)動(dòng)速度
上式感應(yīng)電勢(shì)方向由右手定則確定,手心迎著磁通、垂直的拇指指向?qū)w運(yùn)動(dòng)方向,平行四指指向感應(yīng)電勢(shì)方向。
4、能量守恒原理
在質(zhì)量不變的物理系統(tǒng)中,能量總是守恒的,能量既不能憑空產(chǎn)生,也不能憑空消失,而僅能變換的形式。在電動(dòng)機(jī)能量的平衡關(guān)系式為:電源輸入的電能=磁場(chǎng)儲(chǔ)能的增加 熱能的能量損耗 機(jī)械能的輸出式中:轉(zhuǎn)換為熱能的能量損耗主要包括三部分
⑴定、轉(zhuǎn)子繞組銅耗;


⑵交變磁通在鐵芯的鐵耗;
⑶通風(fēng)、摩擦產(chǎn)生的機(jī)械損耗。
三、單相異步電動(dòng)機(jī)工作原理
在三項(xiàng)點(diǎn)集中,當(dāng)定子三相繞組接到三相交流電源時(shí),對(duì)稱(chēng)三相交流電流在
三相對(duì)稱(chēng)繞組中流通,產(chǎn)生圓形旋轉(zhuǎn)磁勢(shì)和磁場(chǎng),從下圖表示:電流隨時(shí)間變化,產(chǎn)生磁勢(shì)和磁場(chǎng)在空間旋轉(zhuǎn),旋轉(zhuǎn)速度由電源頻率f和電機(jī)極數(shù)p決定。n=2x60/p*f式中n—旋轉(zhuǎn)磁轉(zhuǎn)速(r/min)p—電機(jī)極數(shù)
f—電源頻率(HZ)在單相電機(jī)中,由于單相繞組產(chǎn)生的使脈振磁場(chǎng),電機(jī)沒(méi)有起動(dòng)轉(zhuǎn)矩,不能起動(dòng),如下圖所示:
因此在單相電機(jī)定子鐵芯中嵌放兩繞組且其軸線在空間相隔90°電角度,兩相繞組的線徑、匝數(shù)分布個(gè)不相同,其中一項(xiàng)繞組稱(chēng)為主繞組(用M表示)。另一項(xiàng)繞組稱(chēng)為付繞組(用A表示)。付繞組鐵移相元件接入電源。結(jié)構(gòu)原理如下圖:
在單相電機(jī)中,若定子上的主、付兩相繞組完全對(duì)稱(chēng),兩相繞組接到兩相對(duì)稱(chēng)電源,則與三相電機(jī)一樣也產(chǎn)生在空間旋轉(zhuǎn)的圓形旋轉(zhuǎn)磁勢(shì)和磁場(chǎng),如下圖:
可見(jiàn)對(duì)稱(chēng)繞組通入對(duì)稱(chēng)兩相電流產(chǎn)生的旋轉(zhuǎn)磁勢(shì)與三相電機(jī)產(chǎn)生旋轉(zhuǎn)磁勢(shì)一樣。其旋轉(zhuǎn)速度與電源頻率和電機(jī)極數(shù)有關(guān):n=120f/p
在單相電機(jī)的轉(zhuǎn)子中鑄有許多彼此相連通的鼠籠形鋁導(dǎo)條。
當(dāng)電機(jī)中磁場(chǎng)以n速度旋轉(zhuǎn)時(shí),處于旋轉(zhuǎn)磁場(chǎng)中的轉(zhuǎn)子導(dǎo)條就會(huì)切割磁力線而產(chǎn)生感應(yīng)電勢(shì)和感應(yīng)電流,感應(yīng)電流在磁場(chǎng)的作用下產(chǎn)生電磁力和電磁力矩,形成一定得轉(zhuǎn)速n’。一般情況下電機(jī)轉(zhuǎn)速n’不等于旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)速n。因?yàn)閚’=n時(shí),轉(zhuǎn)子導(dǎo)條相對(duì)旋轉(zhuǎn)磁場(chǎng)是靜止的,導(dǎo)條中就不會(huì)產(chǎn)生感應(yīng)電勢(shì)和感應(yīng)電流,電機(jī)就不會(huì)電磁力矩,電機(jī)的轉(zhuǎn)速就會(huì)自然下降。因轉(zhuǎn)子速度始終低于旋轉(zhuǎn)磁場(chǎng)速度,故此種電機(jī)為“單相異步電動(dòng)機(jī)”。
四、電容運(yùn)轉(zhuǎn)單相異步
電動(dòng)機(jī)工作繞組及主繞組M與副繞組A的軸線在空間相隔90°電角度,副繞組串聯(lián)一個(gè)電容C在于工作繞組并接與電源,由于付繞組串聯(lián)了電容所以副繞組中的電流在相位上超前于主繞組電流,這樣由單相電流i分解成具有時(shí)間相位差的兩相電流iM和Ia,因而電機(jī)的兩相繞組能產(chǎn)生圓形或橢圓形的旋轉(zhuǎn)磁場(chǎng)。
2、無(wú)刷直流電動(dòng)機(jī)
無(wú)刷直流電動(dòng)機(jī)就是變頻技術(shù)與直流電機(jī)相結(jié)合的產(chǎn)物,其具有效率高、噪音低、調(diào)速精度高、振動(dòng)小、調(diào)速范圍寬、壽命長(zhǎng)等特點(diǎn)。下面就空調(diào)用無(wú)刷直流電機(jī)的組成及工作原理作簡(jiǎn)要介紹:
⑴直流電機(jī)的組成
直流電機(jī)本體:定子主要采取集中式繞組,根據(jù)控制不同,繞組相數(shù)有單相、二相、三相、四相等結(jié)構(gòu),用的最多的是三相繞組結(jié)構(gòu),繞組接法有星型接法和環(huán)形接法兩種,絕大部分繞組采用星型接法。轉(zhuǎn)子部分采用磁鋼,磁鋼提供電機(jī)的主磁場(chǎng)。電機(jī)控制部分:無(wú)刷電機(jī)的控制方式主要有PAM(脈幅調(diào)制技術(shù))和 PWM(脈寬調(diào)制技術(shù)),兩種控制方式各有優(yōu)缺點(diǎn)。
高壓油位置傳感器PWM驅(qū)動(dòng)電路原理框圖,主要由控制電路、逆變電路、三角波發(fā)生器、比較器、保護(hù)電路等組成。從原理框圖可以看出,無(wú)刷直流電機(jī)的控制部分只包含一直一交變頻電路中的逆
變部分,整流及濾波部分由空調(diào)的主電控完成。
⑵工作原理
眾所周知,永磁體提供的磁極磁場(chǎng)在電機(jī)旋轉(zhuǎn)過(guò)程中固定不變的,這就是要求每個(gè)時(shí)刻定子繞組產(chǎn)生的電樞磁場(chǎng)必須與轉(zhuǎn)子的磁極磁場(chǎng)相對(duì)應(yīng),即繞組的電流方向、導(dǎo)通與關(guān)斷受轉(zhuǎn)子位置的控制。因此,無(wú)刷直流電機(jī)必須有轉(zhuǎn)子位置信號(hào)輸出給電機(jī)的控制電路,電機(jī)的控制電路根據(jù)轉(zhuǎn)子位置信號(hào)來(lái)控制相應(yīng)的功率開(kāi)關(guān)管的導(dǎo)通與關(guān)斷,從而控制相應(yīng)繞組的電流方向、導(dǎo)通與關(guān)斷。定子繞組若按一定的通電順序進(jìn)行切換,就可以形成一個(gè)與轉(zhuǎn)子位置對(duì)應(yīng)的旋轉(zhuǎn)磁場(chǎng),使電機(jī)按要求的旋轉(zhuǎn)方向旋轉(zhuǎn)。相對(duì)磁鋼的某一磁極而言,每個(gè)時(shí)刻與它對(duì)應(yīng)的電樞磁場(chǎng)是固定的,即繞組的電流方向是固定的,這與有刷直流電機(jī)類(lèi)似。
無(wú)刷直流電機(jī)運(yùn)行原理圖,繞組為三相星形接法,120度均布,采用三相半橋驅(qū)動(dòng)方式,轉(zhuǎn)子為一對(duì)極。在圖示位置,磁鋼的磁極中心線與A相繞組對(duì)齊,此時(shí)的控制電路根據(jù)轉(zhuǎn)子位置檢測(cè)信號(hào),使S1開(kāi)關(guān)管觸發(fā)導(dǎo)通,B相繞組通電,在B相繞組磁場(chǎng)的作用下,轉(zhuǎn)子將順時(shí)針旋轉(zhuǎn)120獨(dú)門(mén),到達(dá)虛線轉(zhuǎn)子所示的位置,磁鋼的磁極中心線與B相繞組對(duì)齊,此時(shí),控制電路根據(jù)轉(zhuǎn)子位置檢測(cè)信號(hào),使S1開(kāi)關(guān)管關(guān)斷,使S3開(kāi)關(guān)管導(dǎo)通,A相繞組通電,轉(zhuǎn)子在A相繞組磁場(chǎng)的作用下,轉(zhuǎn)子將順時(shí)針旋轉(zhuǎn)120度,按上述通電順序循環(huán)導(dǎo)通,轉(zhuǎn)子就順時(shí)針旋轉(zhuǎn)下去。無(wú)刷直流電機(jī)采集轉(zhuǎn)子位置信號(hào),前者,電機(jī)結(jié)構(gòu)簡(jiǎn)單,但電機(jī)起動(dòng)困難;后者,電機(jī)結(jié)構(gòu)稍復(fù)雜,但起動(dòng)平穩(wěn)、可靠,目前大部分的無(wú)刷直流電機(jī)均采用后者。位置傳感器的種類(lèi)很多,空調(diào)用的無(wú)刷直流電機(jī)一般采用霍爾元件作為位置傳感器。
無(wú)刷直流電機(jī)大部分采用三相星形繞組結(jié)構(gòu),橋式控制電路,下面就二相導(dǎo)通星形三相六狀態(tài)的無(wú)刷直流電機(jī)的驅(qū)動(dòng)原理作詳細(xì)介紹:在此電機(jī)結(jié)構(gòu)中,電機(jī)一般需要三個(gè)霍爾元件。兩個(gè)霍爾元件之間的空間夾角為120度電角度,所以輸出的脈沖信號(hào)相隔120度電角度。從真值表可以看出,每個(gè)霍爾元件一次導(dǎo)通 180度,每隔60度必有一個(gè)霍爾元件的輸出狀態(tài)發(fā)生卻換,三個(gè)霍爾元件的輸出狀態(tài)的組合共有六種。與上述的霍爾元件的輸出狀態(tài)相對(duì)應(yīng),在一個(gè)周期內(nèi),三相繞組間隔60度電角度換相一次,每個(gè)時(shí)刻有兩條相繞組導(dǎo)通,每相繞組連續(xù)導(dǎo)通120度。每相繞組正反向各導(dǎo)通一次,導(dǎo)通時(shí)間占三分之二周期。假定電樞各相繞組的導(dǎo)通次序?yàn)椋篣V\UW\VW\VU\WU\WV。
電機(jī)在該電樞磁場(chǎng)的作用下,按既定方向旋轉(zhuǎn)。真值表的參數(shù)必須與控制電路的邏輯程序相吻合,電樞磁場(chǎng)與轉(zhuǎn)子主磁場(chǎng)將不匹配,電機(jī)將能運(yùn)轉(zhuǎn)或倒轉(zhuǎn)。
⑶電機(jī)調(diào)速


就調(diào)速原理來(lái)說(shuō),無(wú)刷直流電機(jī)類(lèi)似于一般的直流電機(jī),通過(guò)改變電樞兩端的直流電壓大小來(lái)改變電動(dòng)機(jī)的轉(zhuǎn)速。無(wú)刷直流電機(jī)有兩種改變電壓的方法:PAM 和PWM,PAM是電壓的脈沖度保持不變,調(diào)節(jié)電壓的幅值大小來(lái)改變電壓的平均值大小;PWM正好相反,即電壓脈沖幅值不變,脈沖寬度磕掉。PAM方式調(diào)速。其調(diào)速線性度好、噪音低,控制電路簡(jiǎn)單,但線路較復(fù)雜,噪音較大,主要用于高壓電機(jī)。
⑷PWM調(diào)速的實(shí)現(xiàn)
Vi為固定頻率和固定電壓的三角波,Vsp為直流電機(jī)電壓,兩者輸入一比較,Vi輸入比較器的同相端。當(dāng)Vsp大于Vi時(shí),比較器輸出信號(hào)Vo為高電平,當(dāng)Vsp小于Vi時(shí),比較器輸出信號(hào)Vo為低電平,Vo為一系列等寬度的脈沖波形,調(diào)節(jié)Vsp電壓的大小,即可調(diào)節(jié)Vo的脈沖寬度的大小。直流高壓 Vm施加到電機(jī)繞組兩端,即可在繞組兩端得到脈沖電壓幅值不變,脈沖電壓寬度可調(diào)的電壓,調(diào)節(jié)Vo的脈寬占空比,機(jī)可調(diào)節(jié)電機(jī)繞組兩端的電壓平均值的大小,從而調(diào)節(jié)電機(jī)轉(zhuǎn)速。PWM控制方式輸出給繞組的電壓波形是一系列等寬度的矩形波,矩形波含義較大成分的諧波。
在某些場(chǎng)合,為了減少諧波對(duì)電機(jī)產(chǎn)生的不良影響,如轉(zhuǎn)矩脈動(dòng)、振動(dòng)噪音和附加損耗的增加等,希望輸給繞組的電壓為正弦波,因此控制方式就要采用正弦脈寬調(diào)制技術(shù)(SPWM)在PWM控制方式的基礎(chǔ)上,吧Vsp電壓由輸入直流電壓該為輸入正弦波電壓,Vo即為一組幅值不變,寬度按正弦波規(guī)律變化的矩形脈沖波。用Vo來(lái)控制逆變電路的開(kāi)關(guān)管的導(dǎo)通與關(guān)斷,輸給電機(jī)繞組的電壓的平均值即按正弦規(guī)律變化,從而改善電機(jī)的性能。在有特殊要求應(yīng)用場(chǎng)合,可以改變 Vsp電壓的性質(zhì)來(lái)改變PWM控制方式的特性,是PWM控制方式滿(mǎn)足使用要求。
⑸應(yīng)用
因?yàn)椴捎昧俗冾l技術(shù)和位置傳感技術(shù),使無(wú)刷直流電機(jī)繼承了有刷直流電機(jī)的特性,又無(wú)有刷直流電機(jī)的缺點(diǎn),所以直流電機(jī)得到迅速發(fā)展,在各個(gè)領(lǐng)域得到了廣泛的應(yīng)用。以家用變頻空調(diào)為例,使用無(wú)刷直流電機(jī),電機(jī)轉(zhuǎn)速的調(diào)節(jié)范圍很寬,在變頻空調(diào)需要快速制冷、制熱;無(wú)刷直流電機(jī)易于實(shí)現(xiàn)精確控制;無(wú)刷直流電機(jī)的效率高,為變頻空調(diào)實(shí)現(xiàn)高能效比提供保障。
七、電機(jī)主要參數(shù)
1、空載輸入電流:是指電機(jī)在額定工作電壓、額定電源頻率、額定電容下、空載運(yùn)行(軸上輸出功率為零)情況下,流入電動(dòng)機(jī)的電流稱(chēng)為空載電流。單位:A或mA.
2、空載輸入功率:是指電機(jī)在額定工作電壓、額定電源頻率、額定電容下、空載運(yùn)行(軸上輸出功率為零)情況下,流入電動(dòng)機(jī)的功率稱(chēng)為空載功率。這部分功率消耗主要體現(xiàn)在磁場(chǎng)儲(chǔ)能,定、轉(zhuǎn)子繞組銅耗和鋁耗,交變磁通在鐵芯損耗,通風(fēng)、軸承摩擦產(chǎn)生機(jī)械耗損。單位:W(瓦)
3、負(fù)載輸入電流:是指電動(dòng)機(jī)在額定工作電壓、額定電源頻率、額定電容下、帶額定負(fù)載運(yùn)行在額定轉(zhuǎn)速下,所輸入電機(jī)的電流。單位:A或mA.
4、負(fù)載輸出功率:是指電動(dòng)機(jī)在額定工作電壓、額定電源頻率、額定電容下、帶額定負(fù)載運(yùn)行在額定轉(zhuǎn)速下,軸伸端所輸出的功率。單位:W(瓦)。
5、溫升:是指電動(dòng)機(jī)在制定測(cè)試條件下運(yùn)行,內(nèi)部繞組與鐵芯部分的溫度相對(duì)于測(cè)試環(huán)境溫度的升高值。目前較常用的測(cè)試方法為繞組電阻法。K=(R1-R0)\(234.5 T0)-(T1-T0)
6、噪音:電機(jī)噪音可分為機(jī)械噪音和電磁噪音。機(jī)械噪音通常由電機(jī)裝配不良定、轉(zhuǎn)子擦邊及軸承噪音等形成。定轉(zhuǎn)子氣隙不均勻受裝配零件同軸度的影響較大,磁場(chǎng)過(guò)于飽受設(shè)計(jì)功率較大電機(jī)的材料限制造成。噪音用dB表示。
八、設(shè)計(jì)
單相電容運(yùn)轉(zhuǎn)異步電動(dòng)機(jī)必須提供參數(shù):目前空調(diào)電機(jī)設(shè)計(jì)而言具備下述條件之一即可:1、額定電壓、頻率、電容、負(fù)載轉(zhuǎn)速、負(fù)載輸出功率、外形安裝;2、額定電壓、頻率、電容、負(fù)載轉(zhuǎn)速、實(shí)際負(fù)載、外形安裝;3、額定電壓、頻率、電容、負(fù)載轉(zhuǎn)速、樣機(jī)、外形安裝;4、額定電壓、頻率、電容、負(fù)載轉(zhuǎn)速、T-S曲線、外形安裝;
九、那些參數(shù)變化可引起電機(jī)成本增加在電機(jī)設(shè)計(jì)已是最優(yōu)化狀態(tài)下,下述要求必須增加成本:1、負(fù)載不變情況下,要求提高轉(zhuǎn)速;2、負(fù)載不變情況下,要求降低溫升;
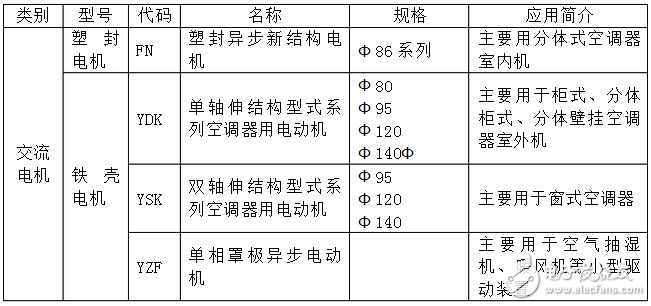
十、目前空調(diào)電機(jī)的種類(lèi)