| �S�ޱ��B�����S�_ |
 |
�r��988 Ԫ(�����) | �a�أ��}�| |
| ������ӆ����1�_ | �l؛�أ������}�| | |
| �ϼܕr�g��2018-01-20 17:01:25 | �g�[����124 | |
�����Н��|늙C����˾
 |
||
| ���Iģʽ�����a�ӹ� | ��˾��ͣ�˽�I���Y��I | |
| �����ИI�����Ͱl늙C�M | ��Ҫ�͑���ȫ�� | |
 �ھ���ԃ �ھ���ԃ  |
||
| ϵ��:������ (����) | �֙C:18065931931 |
�Ԓ: |
����: |
| �]��:9955248@qq.com | ��ַ:����ʡ��������Ϫ��·��32̖ |
|
�S�ޱ��B�����S�_ չ�����®�,�¼��g���®aƷ�Ŀ��ٸ��Q������ʹ��˾�F�еļ��g�ͮaƷ�ܵ��_��,�繫˾���ܾo�����g�lչ����,�����F�¼��g����˾�F�м��g�γ�������L�U���˲���ʧ�L�U���S����˾Ҏģ�ĔU���Լ��ИI������ֵļӄ�,��˾���˲ŵ������ڌӴκ͔��϶����������,�����˾�����˲ų��F����ʧ,��˾���˲����M�����B�C�Ʋ��ܝM�㹫˾���ٰlչ����Ҫ,������˾�����a���I�ͳ��m�lչ��������Ӱ푡���ֵ�l���������ИI��C34�� 
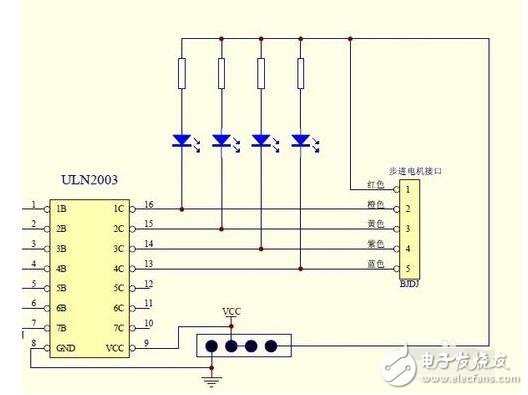
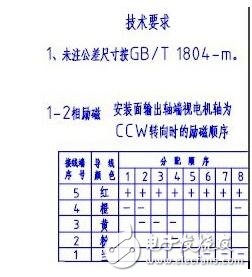
18065931931 ������ ULN2003�����5V���M늙CULN2003��һ�����T�·������7����Ԫ�������O�ܵ����O�քe�Ӹ��_���D�ܵļ�늘O�����ڸ���ؓ�d�r��ԓ�_��ؓ�d�Դ���O�����m�����ã��ڸ���ؓ�d�У��·���_����a���ܴ�ķ�늄ӄݣ����ֹ�p���_���D�ܣ��ӷ���Ķ��O�܁혋��ͨ·��ʹ֮�D�Q��������� �������M늙C�nj���}�_��̖�D׃���λ�ƻ�λ�Ƶ��_�h����늙C���ǬF�����ֳ������ϵ�y�е���Ҫ����Ԫ�������ØO��V�������ڷdz��d����r�£�늙C���D�١�ֹͣ��λ��ֻȡ�Q���}�_��̖���l�ʺ��}�_����������ؓ�d׃����Ӱ푣������M�������յ�һ���}�_��̖�������Ӳ��M늙C���O���ķ����D��һ���̶��ĽǶȣ��Q�顰����ǡ����������D���Թ̶��ĽǶ�һ��һ���\�еġ�����ͨ�^�����}�_���������ƽ�λ�������Ķ��_���ʴ_��λ��Ŀ�ģ�ͬ�r����ͨ�^�����}�_�l�ʁ�����늙C�D�ӵ��ٶȺͼ��ٶȣ��Ķ��_���{�ٵ�Ŀ�ġ� ����ULN2003�����5V���M늙C������һ���M늙C��Ҫ��������ܴ����ֱ��ʹ�Æ�Ƭ�C�������_���������һ��3.3V�Ć�Ƭ�CҲ�o����5V�IJ��M늙C�������Ҫ�·�D�Q���õ�ULN2003оƬ�Ӳ��M늙C��ULN2003������������Ŵ����ã�Ҳʹ����늉�׃����5V��������ULN2003Ҳ�����Լ������O�ܴ�·��ԭ���cULN2003�Ȳ��Y����ơ� ���� ����Ҳ���Dz��M늙CҪ�\�D�r����νo�}�_��늙C�B�m�\�ӡ�ps������o�e�}�_�������D�������D�����D����С��늙C������ ���� �������������D���D�ľ��a �������gҪ����D�õĆ��p���ġ� ����unsigned char F_RotaTIon��8��={0x08��0x0c��0x04��0x06��0x02��0x03��0x01��0x09} ; //FAN ����unsigned char B_RotaTIon��8��={0x09��0x01��0x03��0x02��0x06��0x04��0x0c��0x08} ; //ZHENG �����˺����ɂ���������һ��������Ȧ�����ڶ��������Ƿ���Ҳ�����x�����D�ͷ��D ����void motorNCircle��int n��bool posiTIon�� ����{ ����int i=0; ����int j=0; ����int k=0; ����for��j=0;j��n;j++�� ����{ ����for��i=0;i��64*8;i++�� ����{ ����for��k=0;k��8;k++�� ����{ ����if��TRUE == posiTIon�� ����SetMotor��F_Rotation��k�ݣ�; ����else ����SetMotor��B_Rotation��k�ݣ�; ����Delay��20000��; ����} ����} ����} ����} �����������SetMotor�������������Ĕ�����ͬ�����Ƶ�4��IO pinݔ����ͬ�� ����void SetMotor��unsigned char InputData�� ����{ ����if��InputData & 0x08�� ����{ ����GPIO_ResetBits��GPIOC�� GPIO_Pin_6 ��; ����} ����else ����{ ����GPIO_SetBits��GPIOC�� GPIO_Pin_6��; ����} ����if��InputData & 0x04�� ����{ ����GPIO_ResetBits��GPIOC�� GPIO_Pin_7 ��; ����} ����else ����{ ����GPIO_SetBits��GPIOC�� GPIO_Pin_7��; ����} ����if��InputData & 0x02�� ����{ ����GPIO_ResetBits��GPIOC�� GPIO_Pin_8 ��; ����} ����else ����{ ����GPIO_SetBits��GPIOC�� GPIO_Pin_8��; ����} ����if��InputData & 0x01�� ����{ ����GPIO_ResetBits��GPIOC�� GPIO_Pin_9 ��; ����} ����else ����{ ����GPIO_SetBits��GPIOC�� GPIO_Pin_9��; ����} ����} ���� ������28BYJ-48�������������g�Y�ϣ�����ĽǶȞ�5.625-64 ���Ҏ��Мp���X݆��1��64 ����D64��64���}�_����1Ȧ�� ���һ���}�_�D�^5.625��64=0.08789�ȡ� �����������������ѭ�h�� ����for��j=0;j��n;j++�� ����{ ����for��i=0;i��64*8;i++�� //64*8 ����{ ����for��k=0;k��8;k++�� //4�����p8�� ����{ ����if��TRUE == position�� ����SetMotor��F_Rotation��k�ݣ�; ����else ����SetMotor��B_Rotation��k�ݣ�; ����Delay��20000��; //ע���@���ӕr�Լ�ȥ�{���� ����} ����} ���� �S�ޱ��B�����S�_ �b�d�C�����b�d�C�L��������S�a�S�r�S�ؿ��ӑB��ؐ�WӍ5��8����Ϣ�����˙Cе�������չ�����2016����Ȉ���@ʾ��2016��I�I�����2797.91�fԪ���^����ͬ���»�18.27%���w���ڒ��ƹ�˾�ɖ|�ă�������238.86�fԪ���^����ͬ���»�44.64%������ÿ�������0.07Ԫ������ͬ�ڞ�0.16Ԫ����ֹ2016�꣬���˙Cе�Y�a��Ӌ��7726.44�fԪ���^������ĩ���L3.75%���Y�aؓ���ʞ�46. 
18065931931 ������ |
| �������������չʾ����Ϣ�ɕ��T�����ṩ�����ݵ��挍�ԡ��ʴ_�ԺͺϷ����ɰl�����Tؓ؟���C�֮�Ҍ��˲��Г��κ�؟�Ρ� �������ѣ���Ҏ��ُ�I�L�U�����h����ُ�I���P�aƷǰ�ձش_�J�������Y�|���aƷ�|���� |
�C�֮�ҾW - �C��ИI�����W�j����ý�w
�P���҂� | ϵ�҂� | �V����� | ���ʽ | ʹ�Î��� | ���T���� | ���M朽�Copyright 2011 jdzj.com All Rights Reserved���g֧�֣����ݞI�d�Ƽ�����˾
�N�۟ᾀ��0571-28292387  �ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�Wվ������ԃ��0571-28292385
Ͷ�V�ᾀ��400-6680-889(�֙C7)
�Wվ���I�S���C:��B2-20080178