| �oˢ�l늙C�F�ݮ����غ��� |
 |
�r��988 Ԫ(�����) | �a�أ��}�| |
| ������ӆ����1�_ | �l؛�أ������}�| | |
| �ϼܕr�g��2018-01-20 17:29:25 | �g�[����801 | |
�����Н��|늙C����˾
 |
||
| ���Iģʽ�����a�ӹ� | ��˾��ͣ�˽�I���Y��I | |
| �����ИI�����Ͱl늙C�M | ��Ҫ�͑���ȫ�� | |
 �ھ���ԃ �ھ���ԃ  |
||
| ϵ��:������ (����) | �֙C:18065931931 |
�Ԓ: |
����: |
| �]��:9955248@qq.com | ��ַ:����ʡ��������Ϫ��·��32̖ |
|
�oˢ�l늙C�F�ݮ����غ��� �I����w�Ĺ��I���W��3�����ˡ������ؙC�������I�C���ˡ����������C��ҕ�X���������a�O���Լ�AV�����������O�䣬�нǶȁ������������a�O����m�ĸ���ȡ�Q���䌦Ӳ���cܛ���Y�ϵ��ܡ��������a�K�˵Ĵ�Ҏģ�������������������M�̵ĺ��ĭh������˙Cе�ИI�о��������������a���\ݔ�O�䲼�ֺ��������켼�g�e�۵����й�˾�����������沢�a���^��ĘI���������c���]���L���Ƽ����A���_(,�ɰ�)����֮��(,�ɰ�)�� 
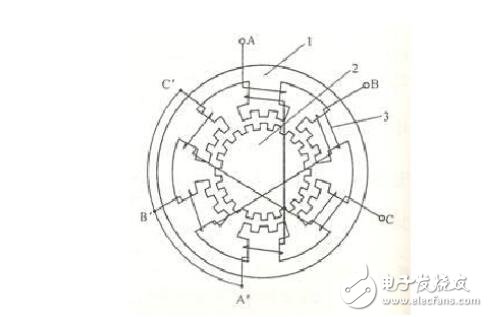
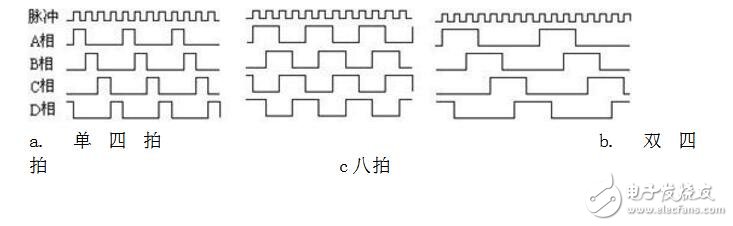
18065931931 ������ ���M늄әC��һ�N����}�_��̖�D�Q�ɽ�λ�ƻ�λ�ƵęC�Ԫ�������M늄әC��ݔ�������}�_���У�ݔ�����t������������λ�ƻ��M�\�ӡ������\����r�£���ÿ�Dһ�ܾ��й̶��IJ��������B�m���M�\�ӕr�������D�D���cݔ���}�_���l�ʱ��և���Č����Pϵ������늉����Ӻ�ؓ�d׃����Ӱ푡����ڲ��M늄әC��ֱ�ӽ��ܔ������Ŀ��ƣ������e�m�˲����C�M�п��ơ� ����ԓ���M늙C��һ���ಽ�M늙C�����ÆΘO��ֱ���Դ��늡�ֻҪ�����M늙C�ĸ����@�M�����m�ĕr��ͨ늣�����ʹ���M늙C���M�D�ӡ��D1��ԓ���෴��ʽ���M늙C����ԭ��ʾ��D�� ���� �����_ʼ�r���_�PSB��ͨ�Դ��SA��SC��SD���_��B��ŘO���D��0��3̖�X���R��ͬ�r���D�ӵ�1��4̖�X�ͺ�C��D���@�M�ŘO�a���e�X��2��5̖�X�ͺ�D��A���@�M�ŘO�a���e�X�����_�PSC��ͨ�Դ��SB��SA��SD���_�r������C���@�M�Ĵ�������1��4̖�X֮�g�����������ã�ʹ�D���D�ӣ�1��4̖�X��C���@�M�ĴŘO���R�� ������0��3̖�X��A��B���@�M�a���e�X��2��5̖�X�ͺ�A��D���@�M�ŘO�a���e�X��������ƣ�A��B��C��D�����@�M݆����늣��t�D�ӕ�����A��B��C��D�����D�ӡ����ಽ�M늙C����ͨ����IJ�ͬ���ɷ֞�����ġ��p���ġ��������N������ʽ���������c�p���ĵIJ������ȣ��������ĵ��D������С�����Ĺ�����ʽ�IJ�����dž������c�p���ĵ�һ�룬��ˣ����Ĺ�����ʽ�ȿ��Ա����^�ߵ��D�������ֿ�����߿��ƾ��ȡ� ���������ġ��p�����c���Ĺ�����ʽ���Դͨ늕r���c���ηքe��D2.a��b��c��ʾ�� ���� ����uln2003�Ӳ��M늙C��������#include��reg52.h�� ����//unsigned char IRCOM�ۣ�={0x00��0x00��0x00��0x00��0x10��0x10}; ����unsigned char zhuangtai=0; ����unsigned char code F_Rotaion��4��={0x03��0x05��0x0d��0x09}; ����void delay��uchar delay��{ ����uchar i; ����for��delay;delay��0;delay--��{ ����for��i=123;i��0;i--�� ����} ����} ����/* ����void delay1��int ms�� ����{ ����uchar y; ����while��ms--�� ����{ ����for��y=0;y��250;y++�� ����{ ����_nop_����; ����_nop_����; ����_nop_����; ����_nop_����; ����} ����} ����} ����*/ ����void moto����{ ����unsigned char i; ����for��i=0;i��4;i++��{ ����P0=F_Rotaion��i��; ����delay��500��; ����} ����} ����void nmoto����{ ����unsigned char i; ����for��i=3;i��=0;i--��{ ����P0=F_Rotaion��i��; ����delay��500��; ����} ����} ����void stopmoto����{ ����P0=0x00; ����} ����void yunxing����{ ����if��zhuangtai==0��{ ����stopmoto����; ����} ����else if��zhuangtai==1��{ ����moto����; ����} ����else if��zhuangtai==2��{ ����nmoto����; ����} ����} ����void jude����{ ����if��P3==0xef��{ ����zhuangtai=0; ����} ����else if��P3==0xdf��{ ����zhuangtai=1; ����} ����else if��P3==0xbf��{ ����zhuangtai=2; ����} ����} ����main����{ ����/* ����IE=0x81; ����TCON=0x01; ����*/ ����P1=0x00; ����P3=0xff; ����jude����; ����yunxing����; ����} ����/*void IR_IN����interrupt 0 ����{ ����uchar j��k��N=0; ����EX0=0; ����delay��15��; ����if��IRIN==1�� ����{ ����EX0 =1; ����return; ����} ����while����IRIN�� ����delay��1��; ����for��j=0;j��4;j++�� ����{ ����for��k=0;k��8;k++�� ����{ ����while��IRIN�� ����delay��1��; ����while����IRIN�� ����delay��1��; ����while��IRIN�� ����{ ����delay��1��; ����N++; ����if��N��=30�� ����{ ����EX0=1; ����return; ����} ����} ����IRCOM��j��=IRCOM��j�ݡ���1; ����if��N��=8�� ����IRCOM��j�� = IRCOM��j�� | 0x80;} ����N=0; ����} ����if��IRCOM��2�ݣ�=~IRCOM��3�ݣ� ����{ ����EX0=1; ����return; ����} ����if��IRCOM��0�ݣ�=0x00�� ����{ ����EX0=1; ����return; ����} ����IRCOM��4��=IRCOM��2��&0x0F; ����IRCOM��5��=IRCOM��2�ݡ���4; ����play����; ����beep����; ����EX0=1; ����} |
| �������������չʾ����Ϣ�ɕ��T�����ṩ�����ݵ��挍�ԡ��ʴ_�ԺͺϷ����ɰl�����Tؓ؟���C�֮�Ҍ��˲��Г��κ�؟�Ρ� �������ѣ���Ҏ��ُ�I�L�U�����h����ُ�I���P�aƷǰ�ձش_�J�������Y�|���aƷ�|���� |
�C�֮�ҾW - �C��ИI�����W�j����ý�w
�P���҂� | ϵ�҂� | �V����� | ���ʽ | ʹ�Î��� | ���T���� | ���M朽�Copyright 2011 jdzj.com All Rights Reserved���g֧�֣����ݞI�d�Ƽ�����˾
�N�۟ᾀ��0571-28292387  �ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�Wվ������ԃ��0571-28292385
Ͷ�V�ᾀ��400-6680-889(�֙C7)
�Wվ���I�S���C:��B2-20080178