Ŀ�
1 ����
2 ��l��
2.1 ʹ�õ�Ӳ��
2.2 ʹ�õ�ܛ��
2.3 ͨ���B��
3 ͨ�^Modbusͨ�Ō��F(xi��n)V90��(n��i)��λ�ÿ��Ƶ�MDI����
3.1 V90 Modbus �Ĵ����f��
3.2 V90����(sh��)�O�Ì��I��Ʒ���T�ӿɾ��̿�����PLCһ����(j��ng)�N�r
3.3 PLC�ľ���
1 ����
SINAMICS V90�̼��汾1.05�����_ʼ���ŷ������ṩ��Modbus RTU ͨ�Ź��ܡ�PLC����ͨ�^ Modbus ��FC3��FC6���ܴ��a�xȡ�����ŷ��ӵļĴ�����S7-200 Smart��ͨ�^�˜ʵ�Modbus���܉K��ɰl(f��)���ŷ������Ŀ���ָ��x���ӵą���(sh��)������Ԕ��������S-200 SMART PLC ͨ�^Modbus RTU ͨ���B��SINAMICS V90���F(xi��n)��(n��i)��λ�õ�MDI���ܡ�
2 ��l��
2.1 ʹ�õ�Ӳ��
ʹ�õ�Ӳ�����2-1��ʾ��
|
��̖
|
�O�����Q
|
ӆ؛̖
|
|
1
|
SIMATIC S7-200 SMART CPU ST60
|
6ES7288-1ST60-0AA0
|
|
2
|
V90����
|
6SL3210-5FE10-4UA0��V1.05�汾���ϣ�
|
|
3
|
�ŷ�늙C
|
1FL6042-1AF61-0LG1
|
|
4
|
늙C�����a��������|
|
|
��2-1ʹ�õ�Ӳ�����I��Ʒ���T�ӿɾ��̿�����PLCһ����(j��ng)�N�r
2.2 ʹ�õ�ܛ��
ʹ�õ�ܛ�����2-2��ʾ��
|
��̖
|
�� ��
|
|
1
|
Window 7 ��Ş�� 32λ��64λ
|
|
2
|
STEP 7-Micro/WIN SMART ����ܛ��
|
|
3
|
SINAMICS V-ASSISTANT V1.02
|
��2-2ʹ�õ�ܛ��
2.3 ͨ���B��
SINAMICS V90 �ŷ���ͨ�^ RS485 ��|�c PLC �B�ӣ�ʹ�ؘ� Modbus ͨ�Ņf(xi��)�h�M��ͨӍ��ͨ�^Modbus PLC�oV90�l(f��)���ŷ�ʹ�ܺ�ֹͣ����ҿ����xȡ�ŷ������Ġ�B(t��i)�����ϴ��a�����I��Ʒ���T�ӿɾ��̿�����PLCһ����(j��ng)�N�r
SINAMICS V90 �ŷ���ͨ�^ RS485 �ӿڣ�X12��ʹ�� MODBUS �f(xi��)�h�c PLC RS485���˿� 0�� �M��ͨӍ���Ӿ���D2-1��ʾ��
�D2-1 S7-200 SMART CPU �cV90ͨӍ���B��
3 ͨ�^Modbusͨ�Ō��F(xi��n)V90��(n��i)��λ�ÿ��Ƶ�MDI����
3.1 V90 Modbus �Ĵ����f�����I��Ʒ���T�ӿɾ��̿�����PLCһ����(j��ng)�N�r
V90��(n��i)�����ƵĿ��Ɣ�(sh��)��(j��)�Ĵ������3-1��ʾ��
|
�Ĵ�����̖
|
����
|
��λ
|
����ϵ��(sh��)
|
����
|
|
40100
|
IPOS����ģʽ������
|
|
|
|
|
40932/40933
|
MDI �ٶ��O��ֵ
|
1000LU/min
|
1
|
1��2147482647
|
|
40934
|
MDI ���ٶȱ���
|
%
|
100
|
0.1 ��100
|
|
40935
|
MDI �p�ٶȱ���
|
%
|
100
|
0.1 ��100
|
|
40102
|
λ���O��ֵ����
|
LU
|
1
|
-2147482648��
2147482647
|
|
40103
|
λ���O��ֵ����
|
��3-1 V90�ă�(n��i)��λ�ÿ��Ɣ�(sh��)��(j��)�Ĵ���
IPOS����ģʽ�Ĵ��� 40100�����ֵ����x���3-2��ʾ��
|
λ
|
��̖
|
�� ��
|
|
0
|
SON_OFF1
|
ͨ�^������ʹ���ŷ���=0�r��ͨ�^б�º���(sh��)�l(f��)����ͣ܇���}�_��ȡ��
|
|
1
|
OFF2
|
1��OFF2=1,���Sʹ��
0��OFF2=0,����ȡ���}�_
|
|
2
|
OFF3
|
1��OFF3=1,���Sʹ��
0��OFF3=0������ͣ܇���}�_������
|
|
3
|
OPER
|
1�����S�\�У��}�_���Ա�ʹ�ܣ�
0����ֹ�\�У�ȡ���}�_��
|
|
4
|
SETP_ACC
|
�|�l(f��)����������MDI �O��ֵ
|
|
5
|
TRANS_TYPE SE
|
1�����������µ��O��ֵ
0��ͨ�^�|�l(f��)�����������µ��O��ֵ
|
|
6
|
POS_TYP
|
1���^����λ
0��������λ
|
|
7
|
RESET
|
�����
|
|
8
|
�A��
|
|
|
9
|
�A��
|
|
|
10
|
PLC
|
ʹ�� PLC �Ŀ��ƙ�
|
|
11
|
�A��
|
|
|
12
|
�A��
|
|
|
13
|
SREF
|
���ӻ����c������p29240=0��ͨ�^REF ��̖�����c��
|
|
14
|
�A��
|
|
|
15
|
�A��
|
|
��3-2 �Ĵ��� 40100�������Ķ��x
3.2 V90����(sh��)�O��
���ձ�3-3�O���ŷ����������P����(sh��)
|
����(sh��)�O��
|
�f��
|
|
P29003=1
|
P29003���(n��i)������ģʽ
|
|
P29303[0]=3
|
�O��DI3��CWL������λ���B����λ�_�P����ƽ
|
|
P29304[0]=4
|
�O��DI4��CCWL��ؓ��λ���B����λ�_�P����ƽ
|
|
P29004=1
|
�O��SINAMICS V90 ��MODBUSվ��ַ��1
|
|
P29007=2
|
�O��ͨ�Ņf(xi��)�h��Modbus �f(xi��)�h
|
|
P29008=1
|
�x�� Modbus ����Դ,�O��ֵ�Ϳ����ց����� Modbus PZD
|
|
P29009=8
|
�O�Â�ݔ�����ʞ�38400 ����
|
��3-3�ŷ����������P����(sh��)
3.3 PLC�ľ���
PLC�ľ������3-4��ʾ��
|
��̖
|
|
|
1
|
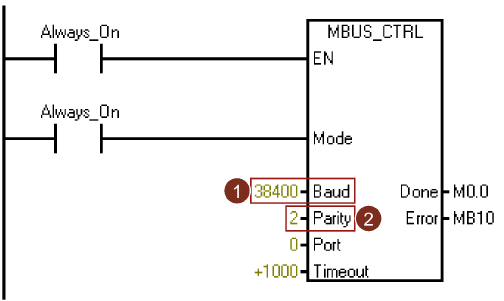
��ʼ��Modbusͨ�Žӿڣ���_�� PLC �IJ������c���O��һ�£��O�� PLC Уʽ��żУparity = 2����
|
|
2
|
ͨ�^�Ĵ��� 40100 ������Ҫ�Ŀ����֡�����O�üĴ��� 40100 ��λ 10 ��1 �����S PLC �����ӡ�ʹ���������Ȍ�16�M�Ɣ�(sh��) 40E ����Ĵ���40100 �У�Ȼ���ٌ��� 40F����
|
|
3
|
�����Ҫ�����������a���ӈ�(zh��)�л����c�����������Ӟ��ŷ�ʹ�ܠ�B(t��i)����ͨ�^�������� 40100 ��13λ����(zh��)�л����c������
|
|
4
|
ͨ�^MBUS_MSG���܉K����λ���O��ֵ���ٶ��O��ֵ����Ĵ��� 40932��40933��40934��40935��40102 ��40103 �С�
|
|
5
|
MDI������λ��40100���ƼĴ���������
(1) ��IPos ����ģʽ�У������ֵ�λ6=0�x��������λģʽ(40F)
(2) �����ֵ�λ5=0���O��ʹ������������MDI �O��ֵ(40F)
(3) ����3-1�еļĴ�����������Ҫ��ֵ (��40934��40935����ʮ���M�Ƶ�4000, 40932/40933����MDI�ٶ�ֵ��40102/40103����MDI��λ��ֵ) ��ͨ�^PLC�l(f��)�Ϳ����ֵ�λ4�����������O��ֵ�����M��MDI�\��(41F)
|
|
|
MDI�^����λ��40100���ƼĴ���������
(1) ��IPos ����ģʽ�У������ֵ�λ6=1���x��^����λģʽ(44F)
(2) MDI�O��ֵ����Ч�ЃɷN��
MDI�O��ֵ������Ч�������ֵ�λ5=1���O�ý��յ�MDI�O��ֵ������Ч(46F)��
����������MDI �O��ֵ�������ֵ�λ5=0���O��ʹ������������MDI �O��ֵ(44F)
(3) ����3-1�еļĴ���������Ҫ��ֵ (��40934��40935����ʮ���M�Ƶ�4000, 40932/40933����MDI�ٶ�ֵ��40102/40103����MDI��λ��ֵ)�������MDI�O��ֵ������Ч���t���M��MDI�\�С������ͨ�^�����ؽ���MDI�O��ֵ���tͨ�^PLC�l(f��)�Ϳ����ֵ�λ4�������������O��ֵ(45F)�����M��MDI�\��
|

 �ھ���ԃ
�ھ���ԃ 

 �ھ��ͷ���0571-87774297
�ھ��ͷ���0571-87774297