| ����ҕ�X�����S�Cе�ֶ�λ���跽�� |
 |
�r��18 Ԫ(�����) | �a�أ����� |
| ������ӆ����1�� | �l؛�أ�������ȫ�� | |
| �ϼܕr�g��2022-05-22 15:01:39 | �g�[����24 | |
�Ϻ��{�Ž����Ƽ�����˾
 |
||
| ���Iģʽ�� | ��˾��ͣ� | |
| �����ИI���C�� | ��Ҫ�͑��� | |
 �ھ���ԃ �ھ���ԃ  |
||
| ϵ��:������ (����) | �֙C:18001645394 |
�Ԓ: |
����: |
| �]��: | ��ַ: |

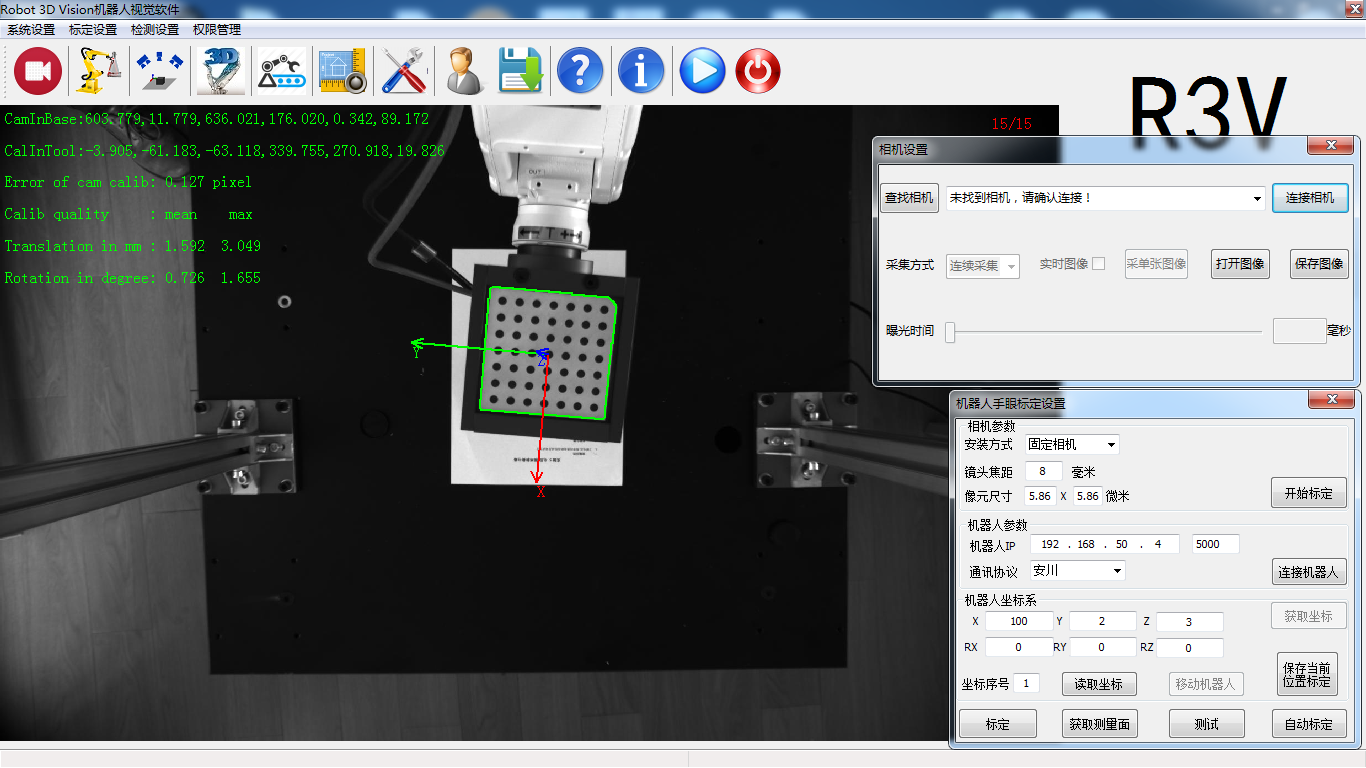
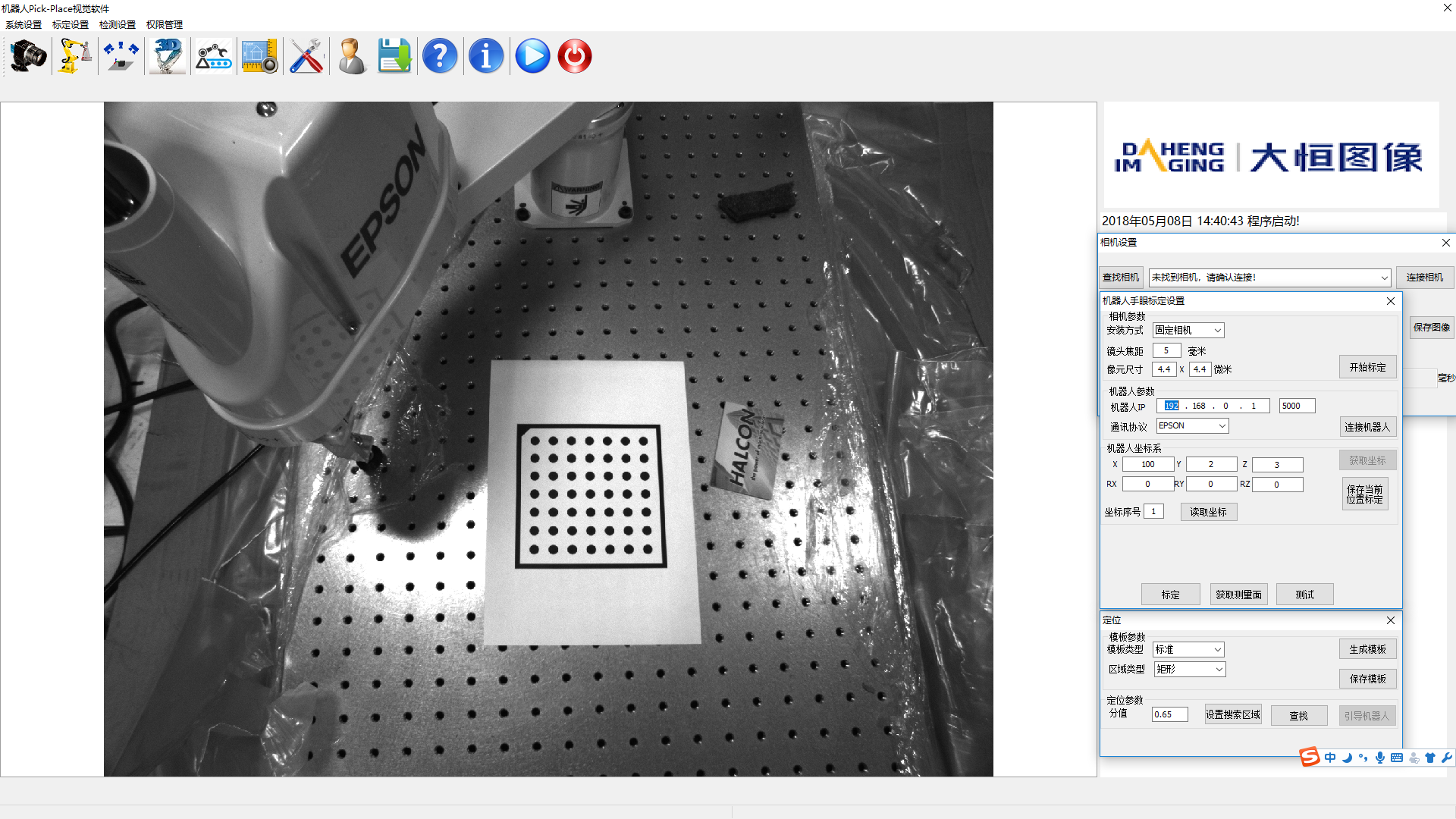
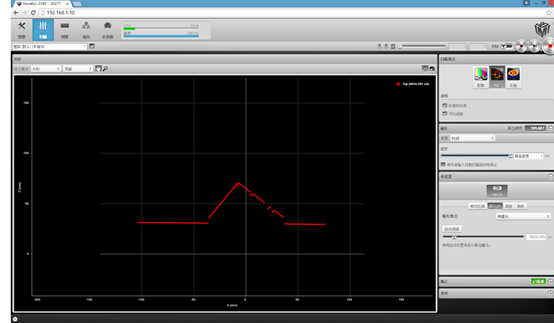
����ҕ�X�����S�Cе�ֶ�λ���跽�����D��C���ˌ��ϵ�yϵ�е��Ƴ�ӭ���˸����У�����P���I�˲ŵ����B�� �Թ��I�C���˺͙C��ҕ�X����ģ����Cе����ӡ��\�ӿ��ơ�׃�l�{�١����a�����g��PLC���Ƽ��g�M���ЙC�����ϡ������Y���ɶ���ģ�K�M�ɣ�ģ�M���H���a���ϙC���ˌ���ͬ�����M�п��ٵęz�y��ʰȡ�����˷��㌍Ӗ�̌W��ϵ�y�M���ˌ��T���OӋ�������M�ЙC������ʾ�̡���λ��ץȡ���b���Ӗ���������ڴ˻��A���M�ЮaƷ�����b������M�b�����⺸�ӡ�ҕ�X�z�y���c�z���i�ݽz�Ȍ��H���I�����Ŀ�� ��ϵ�y�����S�C���˺�ҕ�Xϵ�y�M�����b�ڹ�Wƽ�_�ϣ���Wƽ�_��600mm��600mm��50mm���Ϸ����б��y���w�����y���С��60mm��20mm��17.5mm���ڌ���ҭh���У�ͨ�^���I�������C��ɱ��y���w�����Sλ�ˣ���λ�@ȡ���y���w��λ����Ϣ�������@ȡ�Ķ�λ��Ϣ�����C���˿���Gocator�\���ض���·������Ɍ����y���w���裬��K�ó����y���w�����S������
�aƷ���c
�aƷԔ��
��������
���ܛ��ƽ�_����ҕ�X�ęCе���ϵ�yܛ��������������ҕ�X���ơ������Ĺ��ܡ��Cе���\�ӿ��ƹ��ܡ�HALCON�˶����㷨�ȣ��ṩ�Č���㷨����Uչ���ܾ�����HALCON ����ʽ�ľ��̭h��HDevelop �Ќ��F���W���߿���ͨ�^ܛ����������ϵ�y�и����M���Ĺ��ܳ�������̵�����͌W�����H�Ŀ��������Ό��F�����M��֮�g�ąf�{���ܣ��Լ���������C��ҕ�X�͙C����֮�g�����ۘ˶��㷨���\�ӿ��ƹ��ܡ�
ƽ�_����
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
�C���� pick-place ϵ�y������ |
3D����������ܛ�� |
|
ģ�K |
���� |
���� |
|
|
���S���Զ��P���C����ģ�K |
�S�������ɶ� |
���S |
|
|
ؓ�d |
5 kg |
||
|
��ֱ���_���x |
1193 mm |
||
|
ˮƽ���_���x |
706 mm |
||
|
��ֱ��λ���� |
��0.02 mm |
||
|
�������� |
S �S |
-170�� ~ +170�� |
|
|
L �S |
-65�� ~ +150�� |
||
|
U �S |
-136�� ~ +255�� |
||
|
R �S |
-190�� ~ +290�� |
||
|
B �S |
-135�� ~ +135�� |
||
|
T �S |
-360�� ~ +360�� |
||
|
����ٶ� |
S �S |
376 ��/s |
|
|
L �S |
350 ��/s |
||
|
U �S |
400 ��/s |
||
|
R �S |
450 ��/s |
||
|
B �S |
450 ��/s |
||
|
T �S |
720 ��/s |
||
|
���w���� |
27 kg |
||
|
�C��ҕ�Xģ�K |
���C���� |
1628��H���� 1236��V����CCD |
|
|
��ݔ�����ӿ� |
ǧ�W�� |
||
|
������ʽ |
�h�ι�Դ |
||
|
ܛ������ |
��λ���^�֡��y���� |
||
|
�����_�l |
֧�ֶ�N�_�l�Z�� |
||
|
3D����ģ�K |
ÿ�l����݆�����������c�� |
2040 |
|
|
X����ֱ��� |
0.027 mm ~ 0.034 mm |
||
|
Z����ֱ��� |
1.15 ��m |
||
|
���������x |
108 mm |
||
|
Z����y������ |
40 mm |
||
|
ҕ��������FOV�� |
56 mm ~ 70 mm |
||
|
���ⰲȫ�ȼ� |
3R |
||
|
���C�ߴ� |
137.1 mm �� 90.1 mm �� 43 mm |
||
|
���� |
655 kg |
||
|
�����ٶ� |
380 Hz ~ 25 kHz |
||
|
�ӿ� |
GigE |
||
|
����IO |
������xݔ�루2x��/ ݔ����2x��������ȼ����|�l�����a����RS442�� |
||
|
��Wƽ�_ |
��� |
1200 mm �� 800 mm �� 500 mm |
|
|
���ڳߴ� |
1500 mm �� 900 mm �� 700 mm |
||
| �������������չʾ����Ϣ�ɕ��T�����ṩ�����ݵ��挍�ԡ��ʴ_�ԺͺϷ����ɰl�����Tؓ؟���C�֮�Ҍ��˲��Г��κ�؟�Ρ� �������ѣ���Ҏ��ُ�I�L�U�����h����ُ�I���P�aƷǰ�ձش_�J�������Y�|���aƷ�|���� |
�C�֮�ҾW - �C��ИI�����W�j����ý�w
�P���҂� | ϵ�҂� | �V����� | ���ʽ | ʹ�Î��� | ���T���� | ���M朽�Copyright 2011 jdzj.com All Rights Reserved���g֧�֣����ݞI�d�Ƽ�����˾
�N�۟ᾀ��0571-28292387  �ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�Wվ������ԃ��0571-28292385
Ͷ�V�ᾀ��400-6680-889(�֙C7)
�Wվ���I�S���C:��B2-20080178