| 3D��ӡ�C�@Щ���A��֪�R��֪���ׂ�? |
 |
�r�� Ԫ(�����) | �a�أ����� |
| ������ӆ����1�� | �l؛�أ����� | |
| �ϼܕr�g��2020-10-09 21:31:52 | �g�[����47 | |
�|�_���治�P�����˾
 |
||
| ���Iģʽ���Q���� | ��˾��ͣ����w��I | |
| �����ИI��������� | ��Ҫ�͑��� | |
 �ھ���ԃ �ھ���ԃ  |
||
| ϵ��: () | �֙C:18010987062 |
�Ԓ: |
����: |
| �]��:2550219845@qq.com | ��ַ: |
|
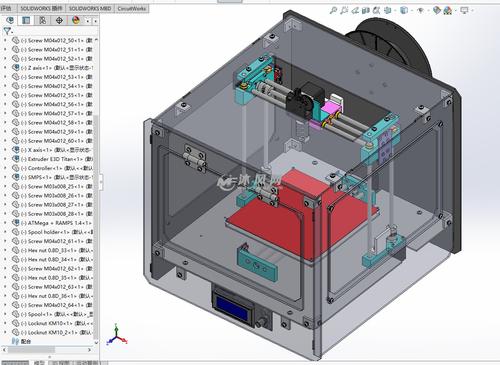
3D��ӡ�C�@Щ���A��֪�R��֪���ׂ�? �ܶ��ˌ�3D��ӡ�C�z�U���Ǻ��˽⣬�������ֲ�Ը���Լ�ȥ�˽⣬��ô�@�͛]�k���ˣ�߀�ß��ĵ�С�����춼���Y���ˣ�������㿂�Yһ��;
һ�����A֪�R 1.3d��ӡ�C�����������@�ׂ��������ɵģ� 1)�C�w��� :�C�w����Ǹ����ӡ�C֮�g������ĵط�������������һ��ԭ�t�Dz����`���ģ����ǽY���Ą���!�����ӡ�C������Ҫ���������Ρ���������C�w�Y���Ļ����Π����ӡ�C�����ĕr��x�S��y�S���ڲ�����\�ӵģ����Ԟ��˱��C��ӡ�C�ľ��ȣ����ԇ��^�\�ӕr�Ą������C�w��Ӱ�ԽСԽ��!��Q�������ǜp�p���^�|������ߙC�w���ԡ������²���Ԕ���f�f���N�C�w�ă�ȱ�c�ġ� 2)�Cе�S �Cе�S����XYZ�S�\�ӵIJ�������Ҫ��3�N��ͣ� ֱ�������ͣ�XYZ�S�ɻ���ֱ�ǘ��ӵģ�XY�Sͨ������ͬ�����Ӳ��M늙C����λ�ģ�Z�S�t���ɽz�U���Ƶġ� ����צ�ͣ��䔵�Wԭ���Ǹ�ֱ��������һ�ӣ��õѿ�������ϵԭ���ġ�ֻ�nj�XY�Sͨ�^���Ǻ�����ӳ�䵽����צ��λ���ϡ� ��C�D���ͣ���C�D������XY�S�������\�õĔ��Wԭ��t�Dz��ØO����ϵ��(������Ԓ�����ģ��н��)�����ѿ�������ϵ��ͬ�������ڿ��Ƴ���������ȫ��ͬ�Ĵ��a�� ����Փ�ρ��f��Փ�ǵѿ�������ϵ߀�ǘO����ϵ������ʾ���g�е�һ�c����һ�ӵģ�Ҳ�����f���@Щ��ӡ�C�Ĵ�ӡ������һ�µġ��������f�ØO����ϵ��Ч���Ͳ���ѿ�������ϵ�ġ�(��Ҫ���̼Һ���Ŷ!) 3)�����· �����·�Ļ����Y�����Ɇ�Ƭ�C�����M늙C�ӡ����Ƈ���ᴲ�Ĉ�Ч����߀�и��N����ӿژ��ɵġ� ��Ƭ�C�F���Ѓɴ�N� 1)��arduino MEGA �_ԴӲ��������A���������w�������Կ��@��چ�Ƭ�C�������һ�����ɲ��M늙C�ӡ���Ч���ܵ�����·���·�档��Ҫ��������Ramps ��Ultimaker���@�ӵĺ�̎�ǜp���˾S�o�ɱ����ѿ��ư�֞���İ塢�Uչ����Ӱ壬�@��������ijһ����p�ĕrֻ��Ҫ���Q�ĵIJ��־Ϳɻ֏�ʹ�ã�����arduino MEGA ���YԴ�^���S�����Uչ���ܕ���ATMEGA644P ��ATMEGA1284оƬҪ�ࡣ�@�N�OӋ��ȱ�c���dz���Ͷ��ɱ��ߣ������w�eҲ���Ȇ�һ���ư�Ҫ��(ԭ�����Ҷ��f��������һ�K�Uչ����Ҫ�w�e�ͳɱ�����!) 2) ֱ����AMTEL ATMEGA644P ��ATMEGA1284��оƬֱ�ӌ���Ƭ�C�Ϳ����·����һ����Ҫ�����ǣ�Sanguinololu��Printrboard��GEN6��Melzi���@�ӵĺ�̎���w�e�^��С����ʼ�ɱ����ȵ�һ���һ�c��ȱ�c���Ǻ��ھS�o���y���]��һ������ӾS���A�ͽ���handle���˵ġ�����С���߲��B���f���@�N���ܾS�Ŀ����Ԏ���0. 4)���졢�ᴲ ������Ҫ�֞�ɷN�� һ�N��J-head; J-head�������^�p���m������һЩ����Ҫ���^�ߣ����ߙCе�Sؓ�d�����^���ĽY����(����צ�;����@����)�����@�����f�ܵ�* ���σr���������ˡ� ��һ�N��Budaschnozzle �@�N���^������ɢ��ͱ���ɢ��ɷN��ʽ��MK7���^���Dz����@�N�Y��������ʽɢ�ᡣmakebot ��reprappro�ęC�����Dz����@�N���^�Y������Ĭ�J�Y���� ��Ȼ�@�ɷN�Y��ͬ��Ҳ�Ǜ]�Ѓ���֮�֣�ֻ���m���c���m��֮�֡��҂�DIY�r���Ը����Լ����H����Ҫ�M�����½M�ϡ� 5)�D���C ���D���C��Ҫ�֞�ֱ�ӔD�z(direct driver Extruder )���X݆�D�z( Wade's Extruder)��Һ�w�D�����N��͡� �҂�ƽ�r���õľ���ֱ�ӔD�����X݆�D�������: �X݆�D���C�����M늙C�Â�С�X݆���ӂ����X݆�M�ДD�z�ģ��@�N�b�õĵĺ�̎���ڌ��ڲ��M늙C�������߀�Ѕ���Ҫ����̫�ߣ�ͬ�r���ڲ����X݆�p�ټ�������˔D�z�������^�á�ȱ�c�����@�N�b�õĽY�����s�̶��^�ߣ��S�o�������c�韩Ŷ�� ֱ�ӔD�z�����M늙Cֱ�ӽӂ��D�z݆�M�ДD�z�ģ��@��Ҫ���^��Ť�صIJ��M늙C���@�N�Y�������c���ڽY�����κþS�o�����Dz��m���L���x�D�z(���^�͔D���C֮�g�ľ��x���^�L����Щ��ӡ�C����߾��ȣ����M���p�p���^�������ģ��t��Ҫ���D���C���ڙC���ϣ����^���D���C֮�gͨ�^�۾��ķ���ϩ�����錧�ܵġ��@�r������X݆�D���C�ˡ�) 6)�Դ��һ����õ�ATX�Դ(��X���C�Դ)���_�P�Դ ��Xbox360 203w�Դ���@��ֻ��Ҫ���]�Դ�Ƿ���12-24V������Ƿ���8A���ϾͿ����ˣ�������ӡ�C����������Դ�����LJ���͟ᴲ���Լ����x�Դ��������x�|���^�õ���X�Դ���_�P�Դ��ȥ���ص���ӳǶ������u�ģ�һ��r�X��100Ԫ���¡� 2. 3D��ӡ�C�\�ӿ��ƵĔ��W֪�R �ѿ�������ϵ�� �ѿ�������ϵ ����ֱ������ϵ��б������ϵ�Ľy�Q�� �ཻ��ԭ�c�ăɗl���S��������ƽ���������ϵ����ɗl���S�ϵĶ�����λ��ȣ��t�Q�˷�������ϵ��ѿ�������ϵ���ɗl���S���ഹֱ�ĵѿ�������ϵ���Q��ѿ���ֱ������ϵ����t�Q��ѿ���б������ϵ�� �ѿ������ˣ�����ʾ���c�ڿ��g�е�λ�ã����s��ֱ�������Ѕ^�e���ɷN���˿�����D�Q�� �O����ϵ�� ��ƽ����ɘO�c���O�S�͘O���M�ɵ�����ϵ����ƽ����ȡ��һ�cO���Q��O�c����O���l��һ�l�侀Ox���Q��O�S����ȡ��һ���L�Ȇ�λ��ͨ��Ҏ���Ƕ�ȡ��rᘷ���������@�ӣ�ƽ������һ�cP��λ�þͿ����þ���OP���L�Ȧ��Լ���Ox��OP�ĽǶȦȁ��_��������(�ѣ���)�ͷQ��P�c�ĘO���ˣ�ӛ��P(�ѣ���);�ѷQ��P�c�ĘO�����ȷQ��P�c�ĘO�ǡ������Ʀѡ�0��0�ܦ�<2�Еr��ƽ���ϳ��O�c�����⣬����ÿһ�c����Ψһ��һ���O���ˡ��O�c�ĘO������ ���O�����⡣����ȥ�������ƣ�ƽ����ÿһ�c���Пo����M�O���ˣ�һ��� �����(�ѣ���)��һ���c�ĘO���� ����ô(�ѣ���+2n��)��(-�ѣ���+(2n+1)��)�������������ĘO���ˣ��@��n ������������ƽ������Щ���������ØO���˕r�����̱��^���Ρ�������ԭ�c�����ģ�r��돽�ĈA�ĘO���˷��̞��=r �����ݾ��ĘO���˷��̞��=a�� �����⣬�E�A ���p�����͒��タ�@3�N��ͬ�ĈA�F������������һ���yһ�ĘO���˷��̱�ʾ�� �O�����c�ѿ�������ϵ֮�g���D�Q�� �ژO����ϵ�cƽ��ֱ������ϵ(�ѿ�������ϵ)�g�D�Q �O����ϵ�еăɂ����� �Ѻ� �ȿ���������Ĺ�ʽ�D�Q�� ֱ������ϵ�µ�����ֵx=��cos�� y=��sin�� ����������ʽ���ɵõ���ֱ������ϵ��x�� y���������Ӌ����O�����µ����� ��=arctany/x ( x������0) �� x= 0����r�£��� y������ ��= 90�� (��/2 radians);�� y��ؓ���t ��= 270�� (3��/2 radians)�� |
| �������������չʾ����Ϣ�ɕ��T�����ṩ�����ݵ��挍�ԡ��ʴ_�ԺͺϷ����ɰl�����Tؓ؟���C�֮�Ҍ��˲��Г��κ�؟�Ρ� �������ѣ���Ҏ��ُ�I�L�U�����h����ُ�I���P�aƷǰ�ձش_�J�������Y�|���aƷ�|���� |
�C�֮�ҾW - �C��ИI�����W�j����ý�w
�P���҂� | ϵ�҂� | �V����� | ���ʽ | ʹ�Î��� | ���T���� | ���M朽�Copyright 2011 jdzj.com All Rights Reserved���g֧�֣����ݞI�d�Ƽ�����˾
�N�۟ᾀ��0571-28292387  �ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�ھ��ͷ���0571-87774297
չ������/�����B�ӣ�0571-87774298
�Wվ������ԃ��0571-28292385
Ͷ�V�ᾀ��400-6680-889(�֙C7)
�Wվ���I�S���C:��B2-20080178